Hi,
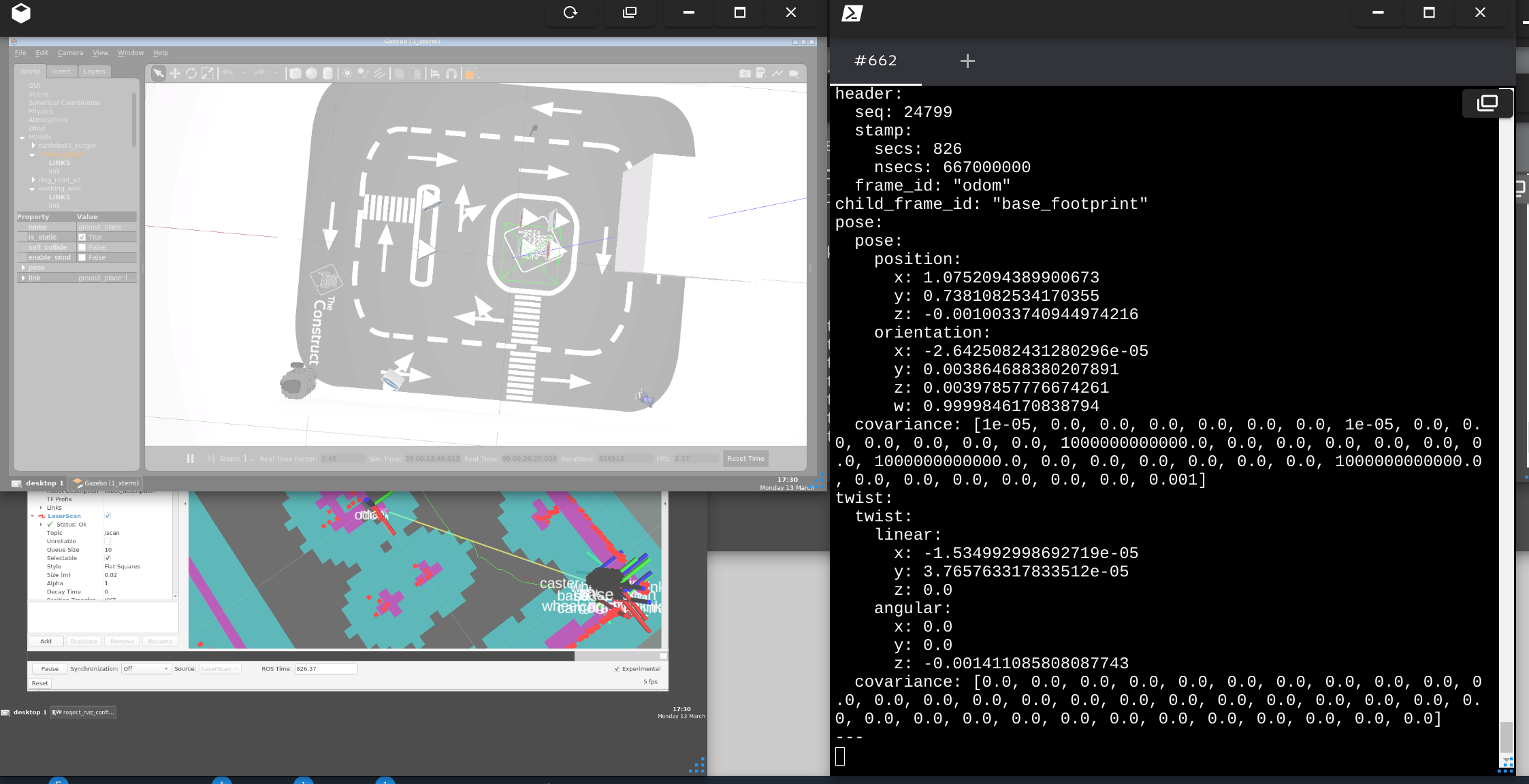
I tested rosject of Navigation in 5 Days on robot in lab, but I am a little confused about the real scale of the robot-field. When the robot was located at corner of the field, I got reads from topic /odom with x=0.7 and y=1.5. But in simulation of Gazebo, the same position shows different scale:
As you can see in screenshot, it says that y=0.73. Due to that this position is almost the very corner of field, and the [x,y] = [0,0] is located at the center of field(as I know and test, pls rectify me if I am wrong), then the whole length along with y-axis is only aroung 1.5.
So I wonder if there is difference in scale or magnitude between fields of simulation and real lab? Or should I remake a map in real field instead of keeping use the map from simulation?
Thanks for explanation.
Hi @MeineLiebeAxt ,
I have completed the project and its presentation. So I am telling this to you from my experience.
- You must map the real robot arena before you can work on it.
- Using the simulation arena map on the real robot will not work well.
- Make sure you have two different sets of maps - one for real robot and one for simulation.
- The odometry locations on real robot will be completely different from simulation.
- Book two real robot sessions. Make use of one session to get the best mapping of the real robot arena. Use the other session to perform the navigation tasks.
Main Information: Do not hard-code locations in your code from your simulation. It will not work with the real robot.
If you need more info, look into my live-presentation video here: Girish Kumar ROS Navigation Project Presentation - YouTube
I have presented all three parts: mapping, localization and navigation (path-planning).
Regards,
Girish
Thanks for your tips and video. Btw I am stunned that the presentation lasted 1 hour… I was told to prepare for only 15min presentation and 5min Q&A…
Hi @MeineLiebeAxt ,
Yeah, my initial preparation was planned at 35 minutes with the complete robot presentation coming to just about 20 minutes. But somehow it extended to 1 hour.
Regards,
Girish
You don’t have to present how to do the mapping or localization. By showing that the path planning works and the robot moves, you implicitly show that you know how to map and localize.
Then, you can just focus on the navigation part while you present
@roalgoal Thanks for clearifying.
1 Like
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.