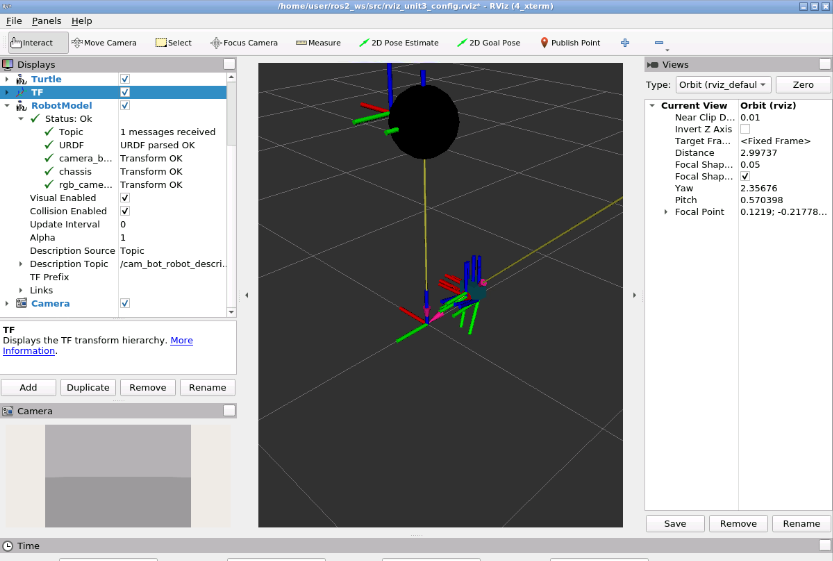
Hello, I was making unit 2 of TF ROS2, I put the correct settings in rviz to be able to finish the unit successfully but the visual part of the model is not shown, only the collision part. The URDFs are “ok” so it doesn’t seem to be an error on that side.
And this is the shell:
user:~/ros2_ws$ rviz2
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user'
[INFO] [1676064280.094498047] [rviz2]: Stereo is NOT SUPPORTED
[INFO] [1676064280.094651141] [rviz2]: OpenGl version: 3.1 (GLSL 1.4)
[INFO] [1676064280.130473581] [rviz2]: Stereo is NOT SUPPORTED
[INFO] [1676064294.581748660] [rviz2]: Stereo is NOT SUPPORTED
[ERROR] [1676064294.688271021] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae]: Unable to open file "package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae".
[ERROR] [1676064294.688439406] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.689560048] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae' for link 'chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.690033080] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae]: Unable to open file "package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae".
[ERROR] [1676064294.690121580] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.690195804] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae' for link 'chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.696060734] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae]: Unable toopen file "package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae".
[ERROR] [1676064294.696173294] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.696303940] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae' for link 'turtle_chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource groupOgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.696620866] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae]: Unable toopen file "package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae".
[ERROR] [1676064294.696695019] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064294.696811771] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae' for link 'turtle_chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource groupOgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
Warning: Invalid frame ID "back_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "back_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "back_yaw_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "front_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "front_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "front_yaw_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "left_wheel" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "right_wheel" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "back_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "back_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "back_yaw_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "front_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "front_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "front_yaw_link" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "left_wheel" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
Warning: Invalid frame ID "right_wheel" passed to canTransform argument source_frame - frame does not exist
at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
[INFO] [1676064305.365562910] [rviz]: Message Filter dropping message: frame 'camera_bot_base_link' at time 919.924 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
[ERROR] [1676064310.187280837] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae]: Unable to open file "package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae".
[ERROR] [1676064310.187452326] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064310.187555520] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae' for link 'chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064310.187837849] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae]: Unable to open file "package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae".
[ERROR] [1676064310.187914487] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064310.187963894] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae' for link 'chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/camera_bot_meshes/camera_bot_scaled.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064423.085682262] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae]: Unable to open file "package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae".
[ERROR] [1676064423.085804338] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064423.085976549] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae' for link 'turtle_chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064423.086354798] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae]: Unable to open file "package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae".
[ERROR] [1676064423.086425072] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
[ERROR] [1676064423.086496335] [rviz2]: could not load model 'package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae' for link 'turtle_chassis': FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)
where is the turtle_tf_3d_ros pkg?