im on the last part of the teb_navigation module, and am having a lot of trouble.
The desciption of the task is veyr short and im not quite sure where to start.
I know that i am missing an /odom frame and a proper odometry topic. There is no odom frame in my tf_tree when i check.
there is cmd_vel and odom_cmd_vel available, and a lot of other topics, but im not sure where to go from here. Am i uspposed to publish this transform myself? and the odometry message? HELP!!!
You are totally right, this project is lacking some data in order to be easier to follow. I will work on it in the following days to improve it. Instead, I would like to suggest to you a couple of new courses we have added to the Academy lately that also make use of the TEB local planner, in case you want to keep practicing with it:
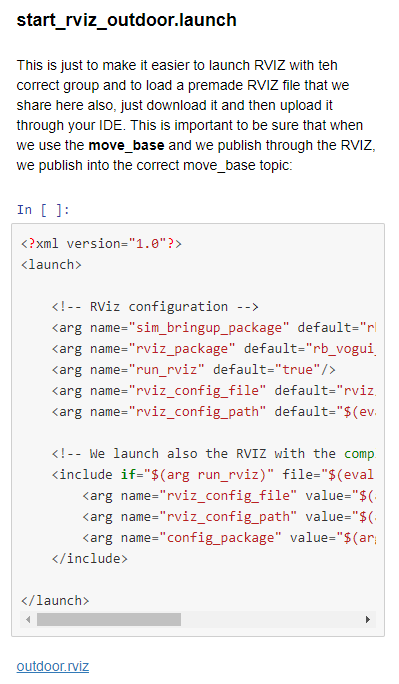
Thanks, i started the robotnik course and ran into another problem. I cannot download the RVIZ config file (outdoor.rviz). Access denied when i click it.
Ok That issue has been fixed. It was related to the fact that it was a non-notebook file. Now we have created a repo where you can download all those extra files, apart from the solution you found also
In the next system update it will be already that solution. SOrry for the inconvenience