Dear community,
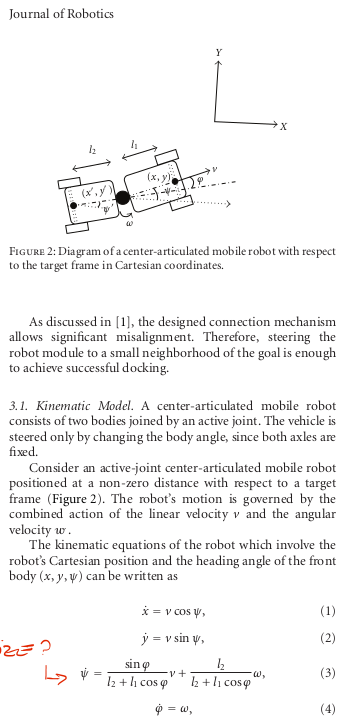
I am currently trying to implement a TEB for a Center-Articulated Mobile Robot. This type of robot has different kinetic behavior which is described in the following images:
How could adapt the car-like robot TEB for the Center-Articulated robot given the state variables in the image?
Thanks in advance for your guide.
Hi,
Well I’m not an articulated vehicles expert, but you might try to approach it as a custom ackerman driver.
You jave to calculate the Centerof Inertial ROtation (CIR ) and addapt thatto be able to controle it. If the articulation is free, you might have to juts control it as a digfferential drive and mak ethe footprint bigger to avoid collisions.
Thank you very much for your response.
In this case the articulation is not free, it is an articulated truck. As you could see in the following video.
Which approach you could use?
Hmm… It seems its connected to teh sterring so I would treate it as a ackerman system modified to compensate for this change in the rear aix CIR.
But I’m not an expert in automotive solutions I’m affraid.
1 Like