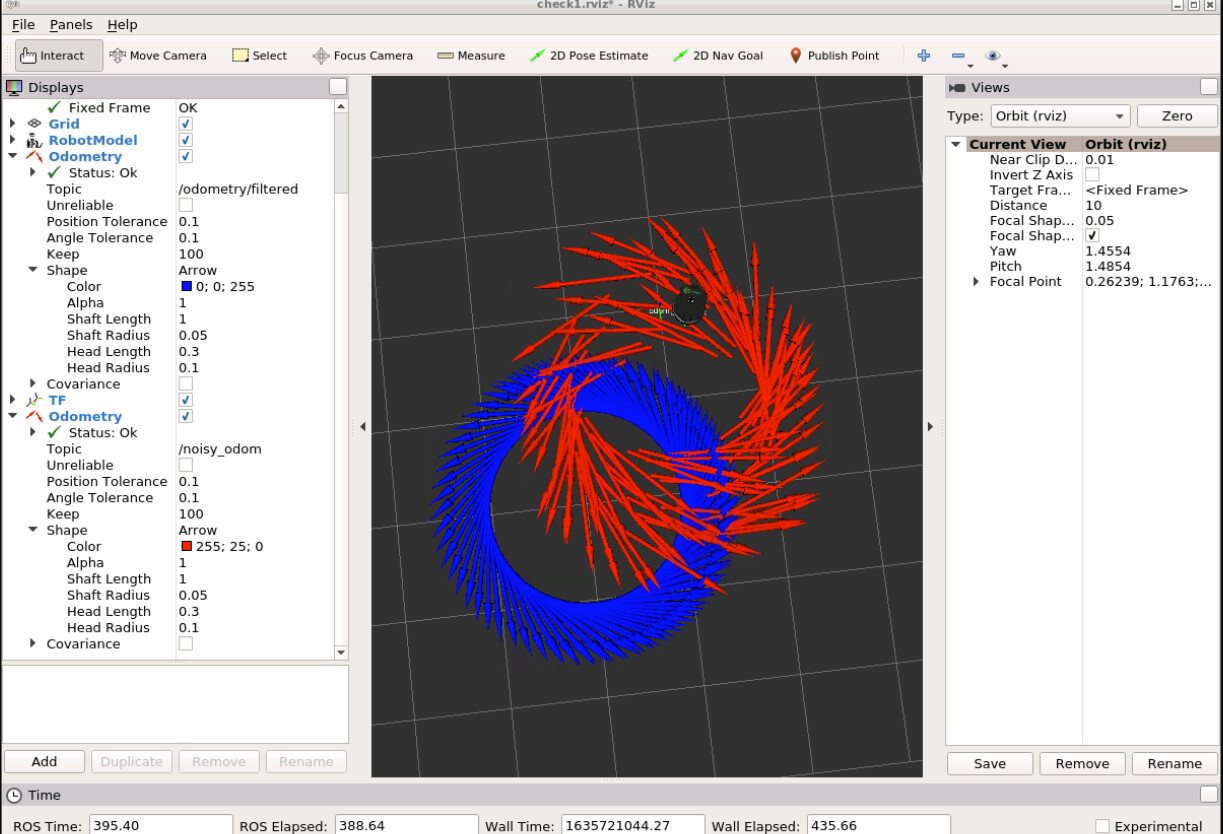
I tried to update the initial state of the robot config file in the turtlebot localization, but still i n RVIZ the /odometry/filtered and /noisy_odom are offset from each other. I have tried publishing to /cmd_vel topic after I have started both the nodes for noisy_odom and the turtlebot_localization package.
, so that the robot starts in the [0,0] position. I even used the initial_state parameter in the configuration file as mentioned in the exercise.
Also I would like to know is my line of reasoning for imu0: /imu/data in the param file is correct :
-
Upon checking the /imu/data topic , I observed the we are measuring the Orientation, Angular Velocities and Linear Acceleration.
-
No position change is measured, we observe orientation change only along Yaw axis(True value), no linear velocities are measured, we do measure the angular velocity along the Yaw axis(True) and finally we measure the linear acceleration along the x-axis(True).
-
Also, I am a bit confused about why we are not including the y-axis linear acceleration. Does this have to do with the fact that we are only publishing x-direction linear velocity to the robot?
Also the frame setting for the map_frame is simply map. I checked the rviz available frames, but there isnt any map frame available. Is this (map) a default frame used when we use rviz?