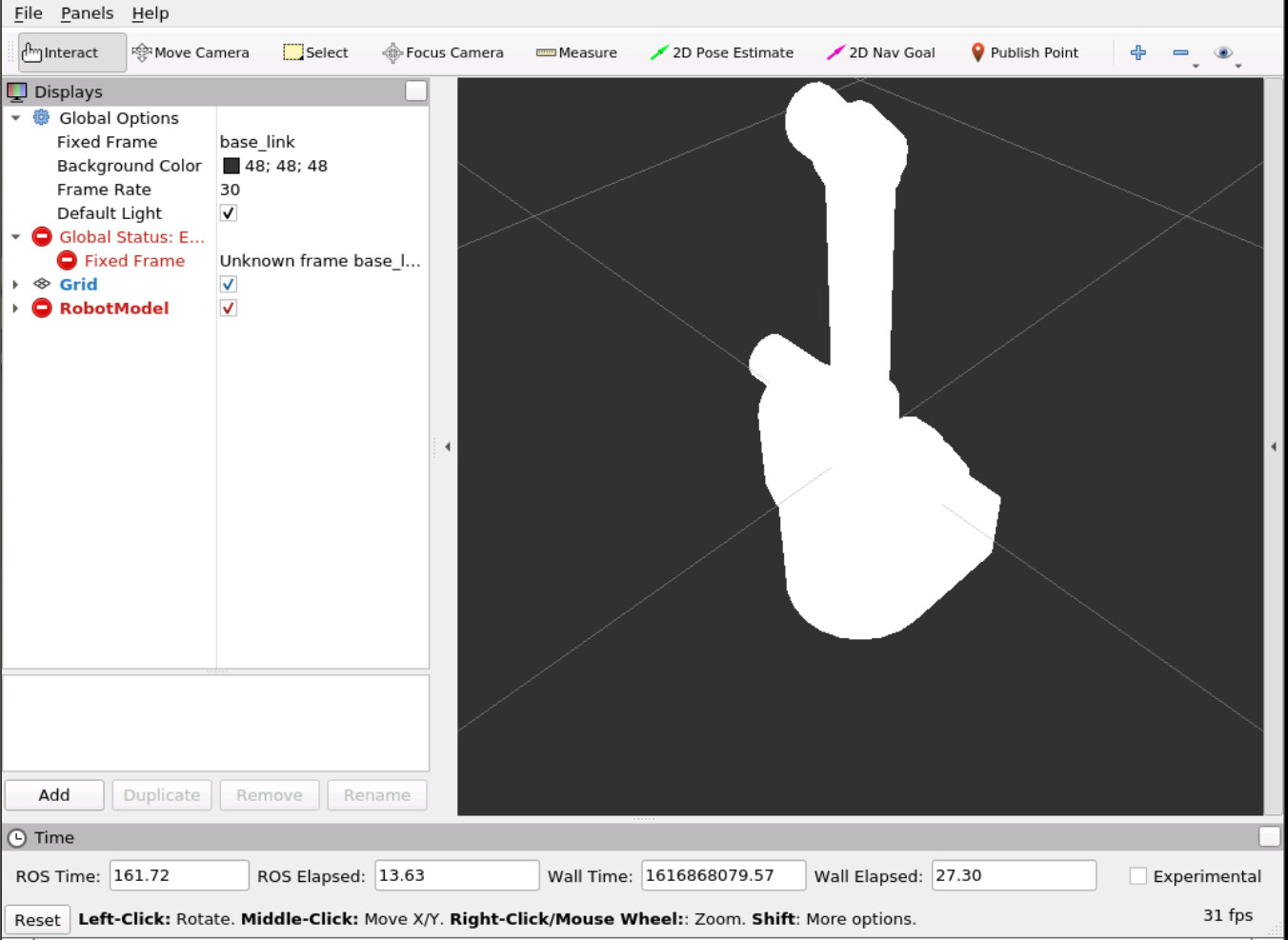
After runnin rosrun rviz rviz in section 9.5, RViz would show the same global status error message (fixed frame) as Fig9.9 shows, so nothing to worry about, I thought. Also it’s showing the robot right away.
The robot statu (error) shows:
No transform from [hokuyo_laser_link]
No transform from [iri_wam_link_1]
[…] and so on.
Removing the robot and re-adding it doesn’t resolve the problem. Presumably for the same reason, the following instructions don’t work.
Hello @ruediger ,
As the instructions say, you have to select iri_wam_link_footprint as the FIxed Frame in RViz.
1 Like
Why when was the Fixed Frame to base_link selected , it gave an error ? What does Fixed Frame exactly do?
Hello @mouidsakka01 ,
The fixed frame is the frame used as a reference for the visualizations (all the frames are transformed to this fixed frame). Therefore, if the fixed frame is wrongly set, or it doesn’t exist, you won’t able to visualize things properly in RViz.
1 Like