Hello ROS people, i am trying to get lidar data on turtle bot 3
few weeks ago rviz was working fine, now i cant get any robot urdf
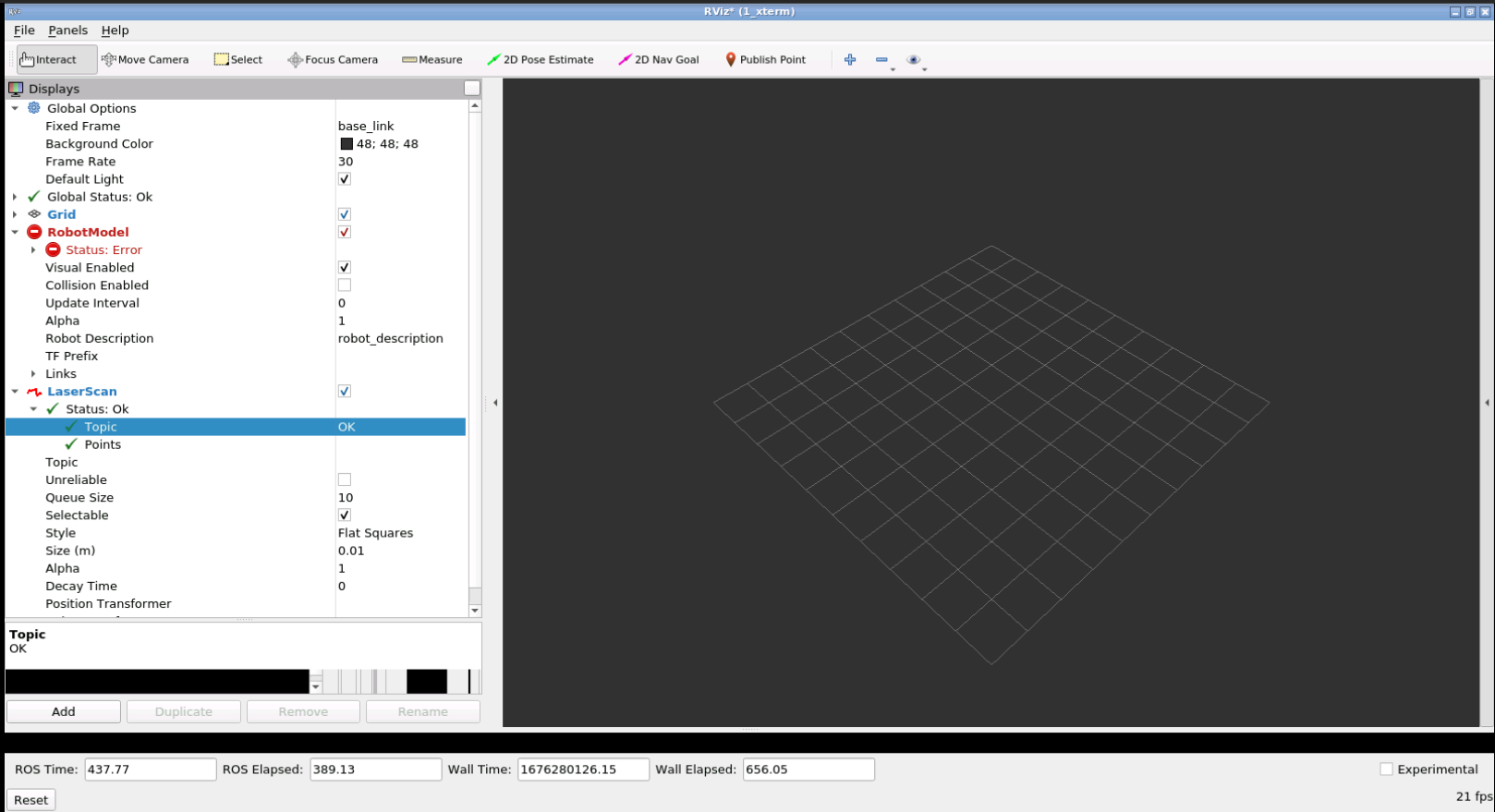
tried changing fixed frame under global settings but it is on base link which is supposed to be ok
any suggestions what should i do ?
Can you expand the error message?
I had a similar problem last year.
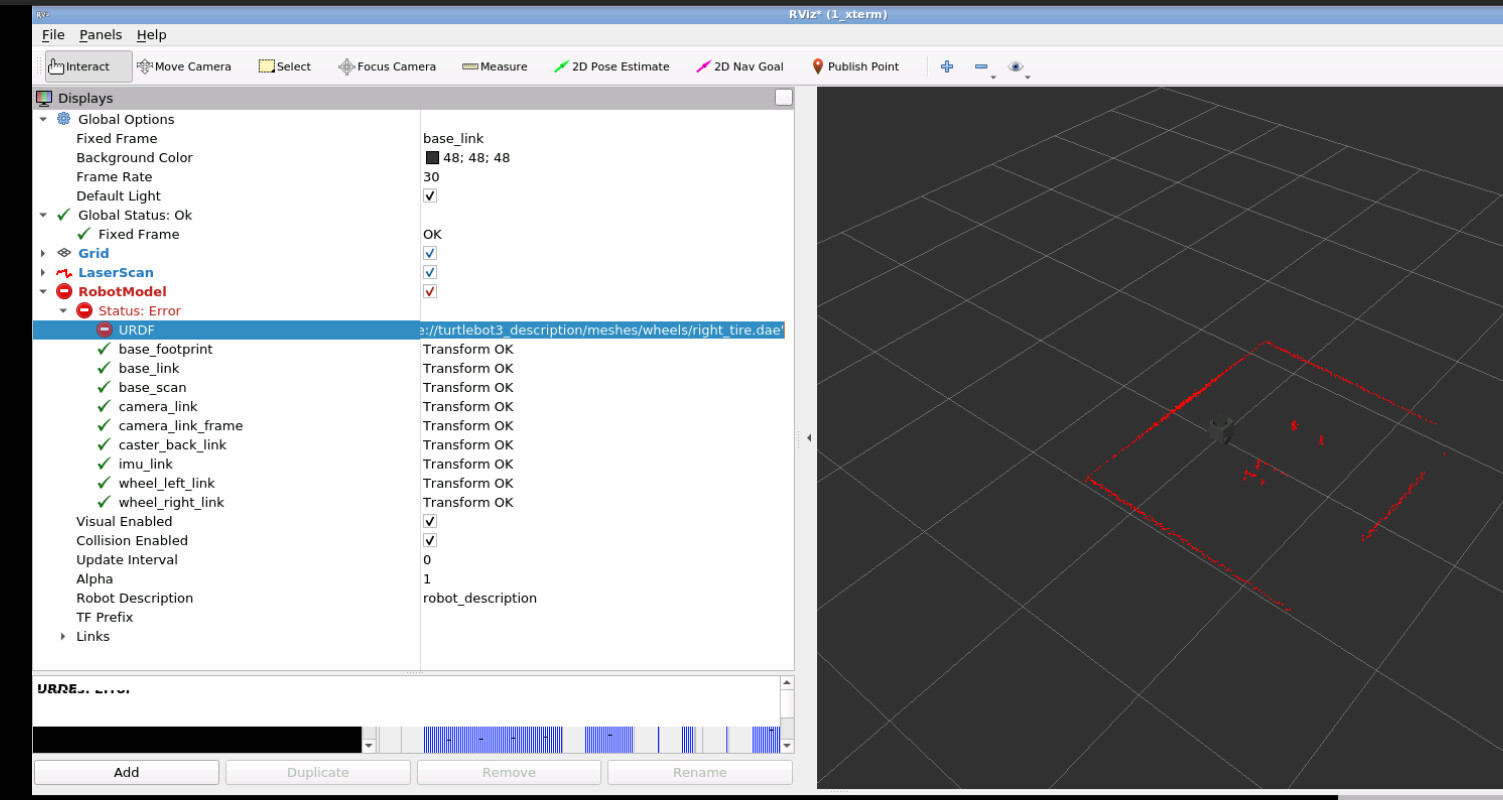
You can see the error in the left menu i have no URDF model , i can only select “collision enabled” than i have like an bad quality version of robot
the error is in the picture something with right tire mesh
Could you please let us know the unit and the specific exercise you are working on?
it is the final project of ros in 5 days on python
Hi @jacob17.y ,
Here is what I get when I checked with my rosject environment:
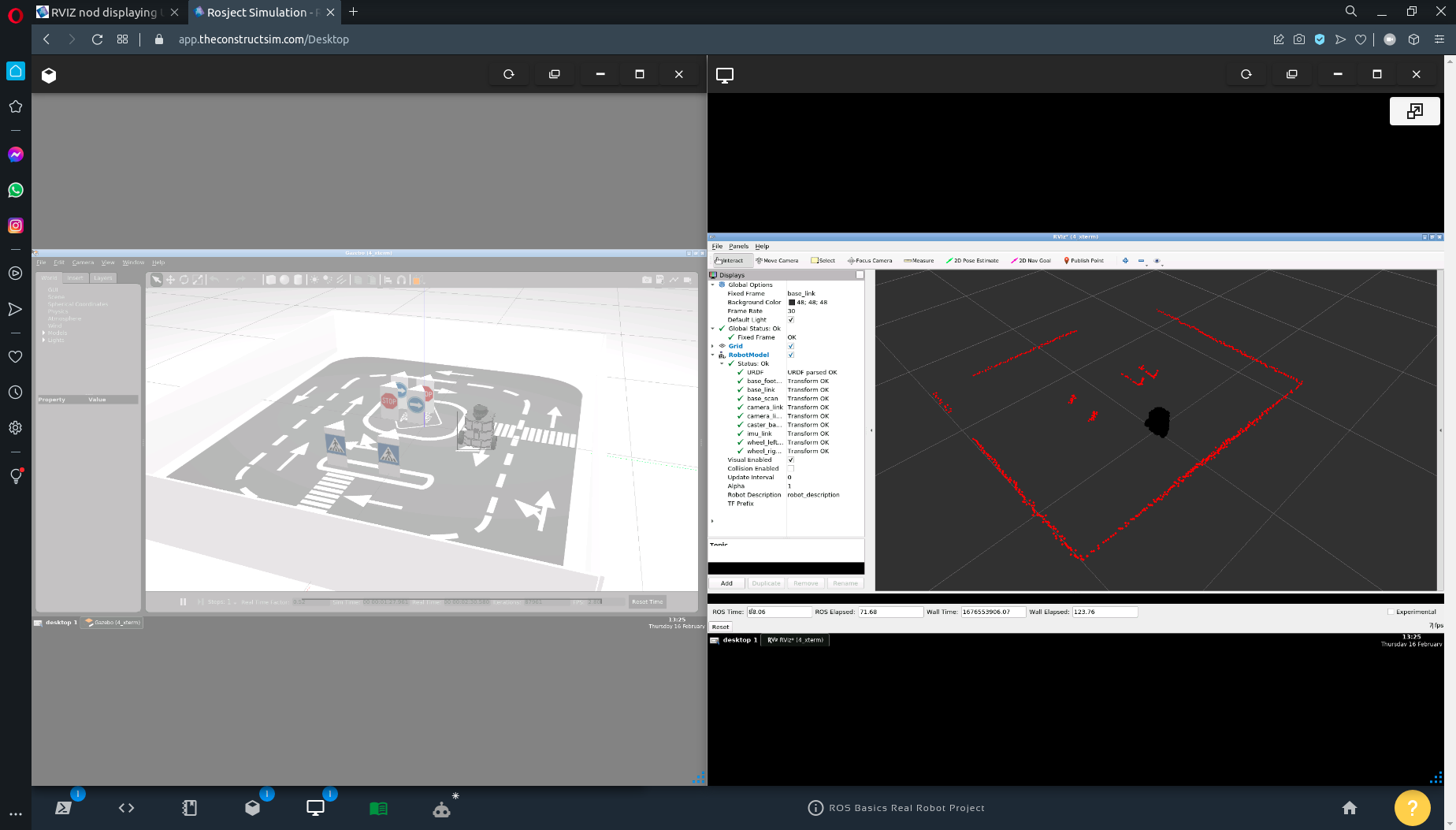
I did not have any issues.
But looking at your second image, you seem to have an issue with the right_tire.dae file.
Navigate to simulation_ws/src/turtlebot3/turtlebot3_description/meshes/wheels/ using your IDE left panel.
Open the right_tire.dae file (on IDE) and replace the contents with the contents in the shared link below.
Here is the link to the contents of the file: right tire dae file
This should fix your problem. Let me know if the problem still remains.
Regards,
Girish
EDIT: I have removed the link above. It is not the same file. @jacob17.y Please send your email as a direct message to me, I will send the file to you. I cannot share it online with a public link.
2 Likes
Hi @jacob17.y ,
I have sent the corresponding file(s) to your email.
Let me know if you still have issues after using them.
Regards,
Girish