Hi,
I have a problem to launch rosp2 (named the part II package)
ros2 launch rosp2 find_wall_launch_file.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2022-02-22-09-09-23-066018-8_xterm-65520
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [rosp2-1]: process started with pid [65684]
[rosp2-1] Traceback (most recent call last):
[rosp2-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rosidl_generator_py/import_type_support_impl.py", line 46, in import_type_support
[rosp2-1] return importlib.import_module(module_name, package=pkg_name)
[rosp2-1] File "/usr/lib/python3.8/importlib/__init__.py", line 127, in import_module
[rosp2-1] return _bootstrap._gcd_import(name[level:], package, level)
[rosp2-1] File "<frozen importlib._bootstrap>", line 1014, in _gcd_import
[rosp2-1] File "<frozen importlib._bootstrap>", line 991, in _find_and_load
[rosp2-1] File "<frozen importlib._bootstrap>", line 975, in _find_and_load_unlocked
[rosp2-1] File "<frozen importlib._bootstrap>", line 657, in _load_unlocked
[rosp2-1] File "<frozen importlib._bootstrap>", line 556, in module_from_spec
[rosp2-1] File "<frozen importlib._bootstrap_external>", line 1166, in create_module
[rosp2-1] File "<frozen importlib._bootstrap>", line 219, in _call_with_frames_removed
[rosp2-1] ImportError: /home/user/ros2_ws/install/custom_interfaces/lib/libcustom_interfaces__rosidl_generator_c.so: undefined symbol: geometry_msgs__msg__Point__Sequence__init
[rosp2-1]
[rosp2-1] During handling of the above exception, another exception occurred:
[rosp2-1]
[rosp2-1] Traceback (most recent call last):
[rosp2-1] File "/home/user/ros2_ws/install/rosp2/lib/rosp2/rosp2", line 33,in <module>
[rosp2-1] sys.exit(load_entry_point('rosp2==0.0.0', 'console_scripts', 'rosp2')())
[rosp2-1] File "/home/user/ros2_ws/install/rosp2/lib/python3.8/site-packages/rosp2/find_wall.py", line 138, in main
[rosp2-1] findwall_service = Service()
[rosp2-1] File "/home/user/ros2_ws/install/rosp2/lib/python3.8/site-packages/rosp2/find_wall.py", line 21, in __init__
[rosp2-1] self.srv = self.create_service(FindWall, 'findwall', self.FindWallService_callback)
[rosp2-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rclpy/node.py", line 1295, in create_service
[rosp2-1] check_for_type_support(srv_type)
[rosp2-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rclpy/type_support.py", line 29, in check_for_type_support
[rosp2-1] msg_type.__class__.__import_type_support__()
[rosp2-1] File "/home/user/ros2_ws/install/custom_interfaces/lib/python3.8/site-packages/custom_interfaces/srv/_find_wall.py", line 235, in __import_type_support__
[rosp2-1] module = import_type_support('custom_interfaces')
[rosp2-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rosidl_generator_py/import_type_support_impl.py", line 48, in import_type_support
[rosp2-1] raise UnsupportedTypeSupport(pkg_name)
[rosp2-1] rosidl_generator_py.import_type_support_impl.UnsupportedTypeSupport: Could not import 'rosidl_typesupport_c' for package 'custom_interfaces'
[ERROR] [rosp2-1]: process has died [pid 65684, exit code 1, cmd '/home/user/ros2_ws/install/rosp2/lib/rosp2/rosp2 --ros-args'].
which the service interface can be showed correctly

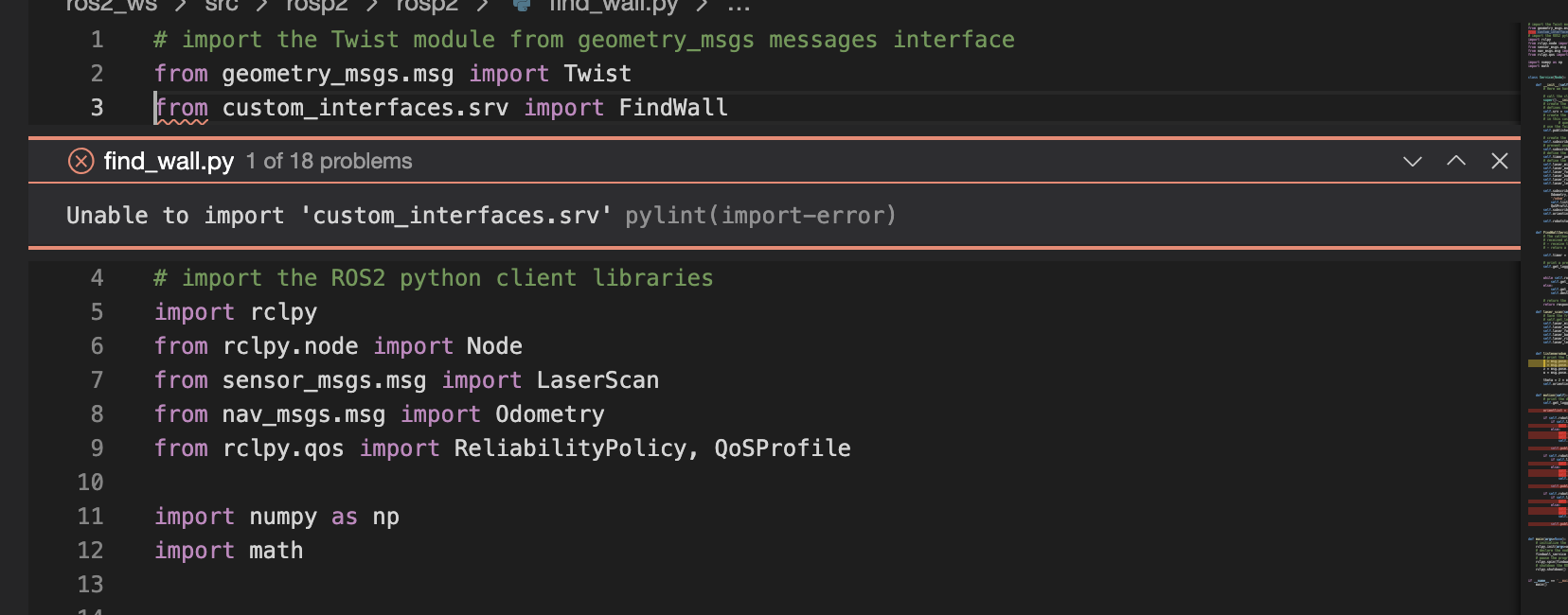
part of the code to import the custom_interfaces.srv FindWall
what could be wrong about? Thx very much!