Category:
Start Part I of rosject after “ROS Basics in 5 Days”
Goal:
Correctly interpret the laser scan data
What I did:
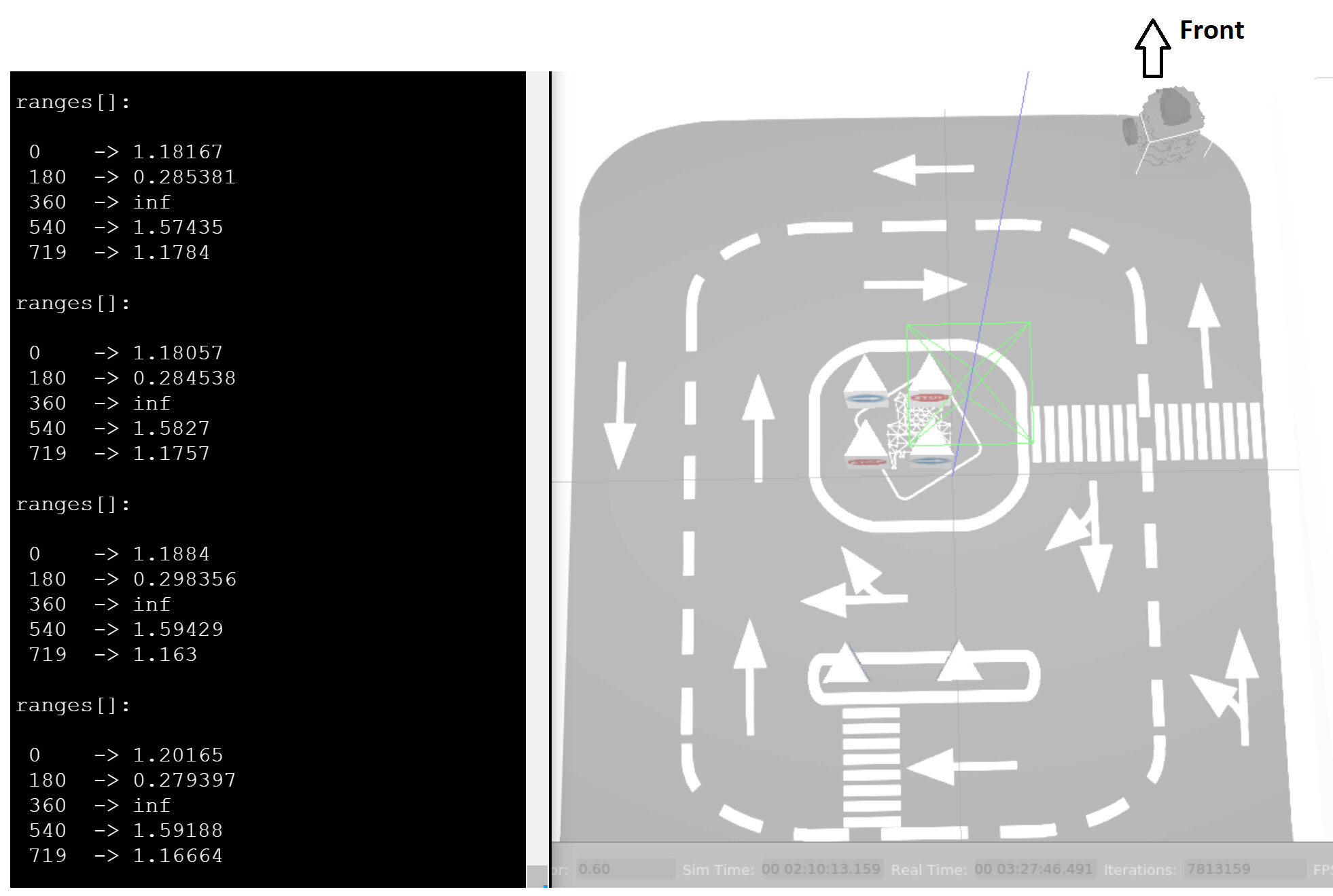
Output ranges from sensor_msgs::LaserScan message in terminal
Question:
From the Laser scan data, which one is front, left, right, back of the turtlebot?
Following the 2 pages Laser scan in myrosject, Incorrect Robot Scan values, they are interpreted as
ranges[0]: Back
ranges[180]: Right
ranges[360]: Front
ranges[540]: Left
ranges[719]: Back
For me, after several tests, I’m still not able to interpret them correctly.
(This picture includes the output of the laser scan data)
(Below is rostopic echo /scan)