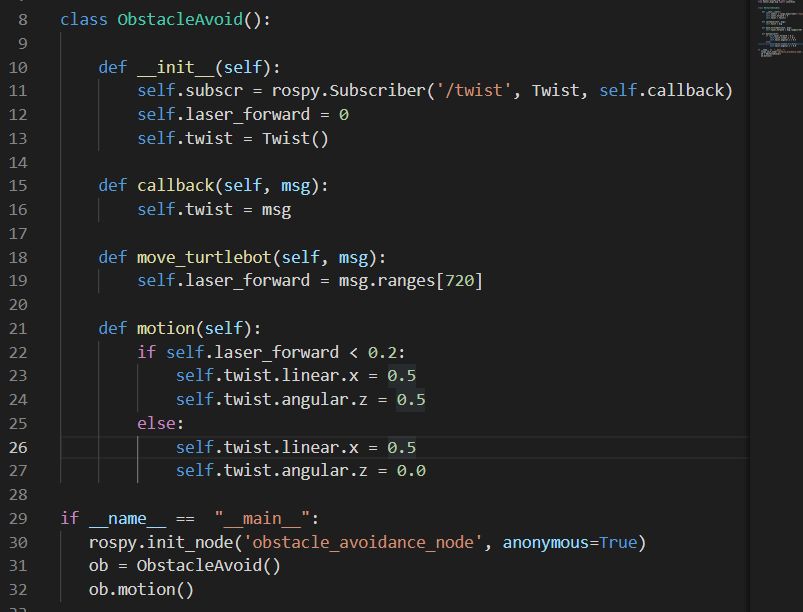
I am trying to do this project and ran into some problems. when I run the code there are no errors but nothing happens. This is my code I using.
Can any help me find the error so that this will atleat do something in the simulation.
I am trying to do this project and ran into some problems. when I run the code there are no errors but nothing happens. This is my code I using.
Hi @flavelmm ,
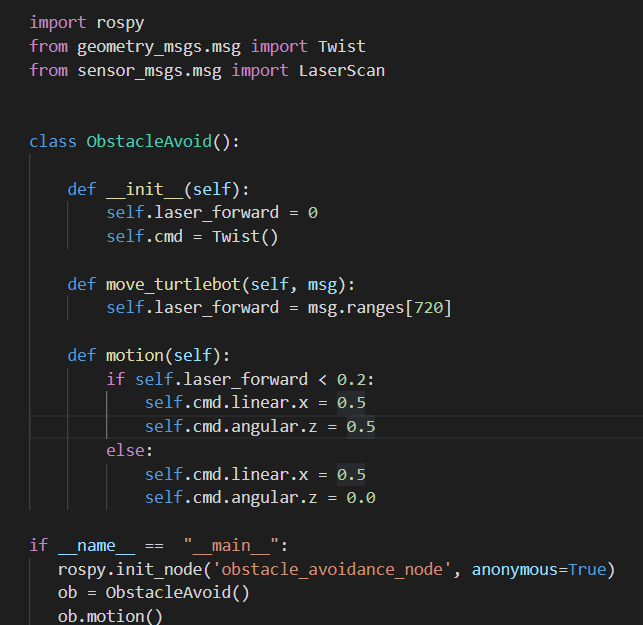
I see the motion method is only called once, there is no loop control running.
And also the move_turtlebot method depends on the msg argument, but I don’t see any subscriber calling this method.
Is this the full code?