in the rosject the launch of the rosbridge works either with
run ros1_bridge dynamic_bridge --bridge-all-topics
run ros1_bridge parameter_bridge
in the latter I see only a subset of topics
/clock
/cmd_vel
/odom
/parameter_events
/rosout
/scan
/tf
/tf_static
in both cases the ros2 command fails to echo topic but works for the ros one command.
I guess this is why my ros2 code doesn’t work. Even ros2 topic echo /clock (any other also) shows a long error message which ends with
alueError: Expected the full name of a message, got 'rosgraph_msgs/msg/Clock'
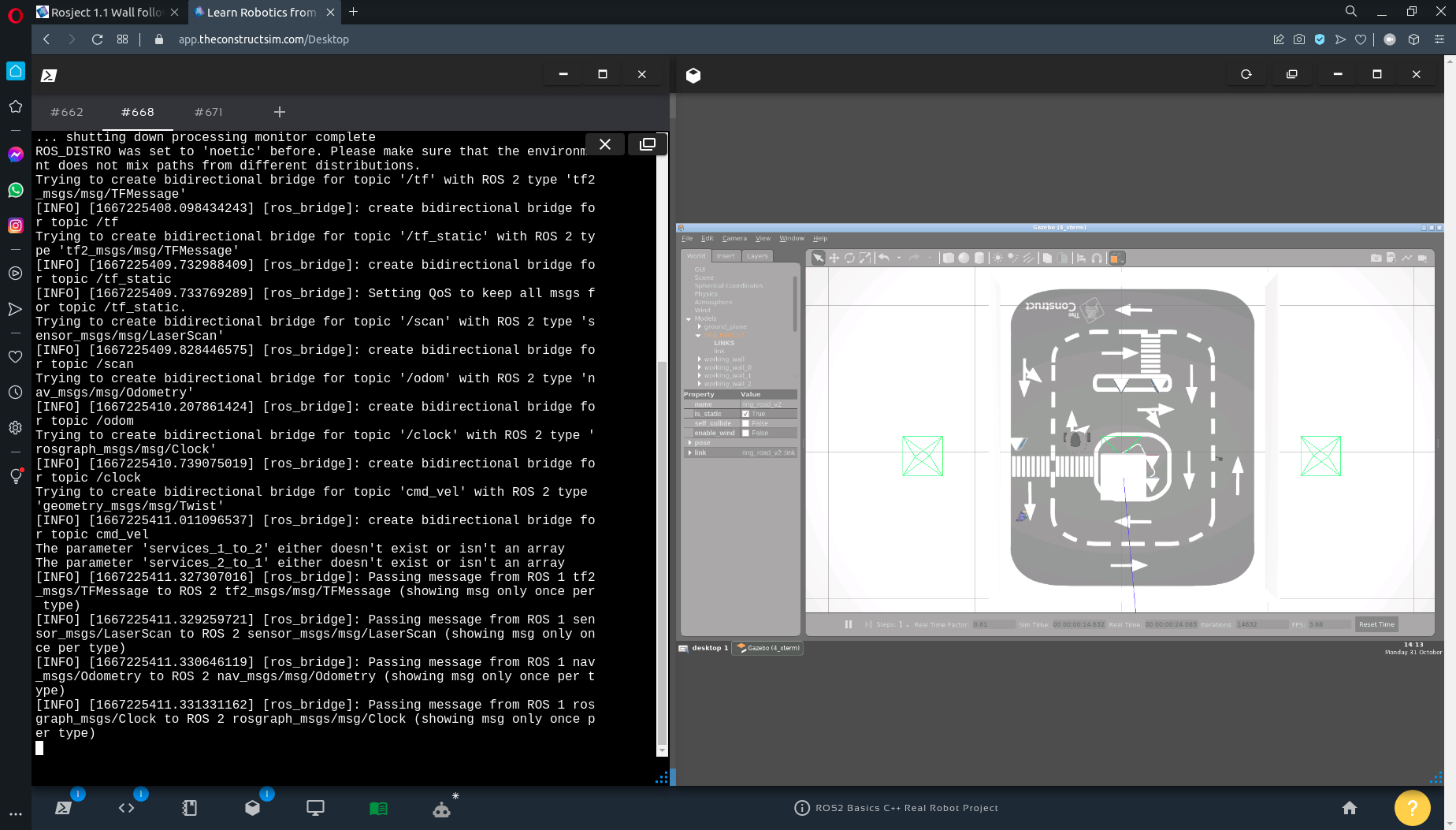
now as I repeat it I see this message during start
[INFO] [1667217078.317129463] [ros_bridge]: create bidirectional bridge for topic cmd_vel
The parameter 'services_1_to_2' either doesn't exist or isn't an array
The parameter 'services_2_to_1' either doesn't exist or isn't an array
I see no additional error message for /scan
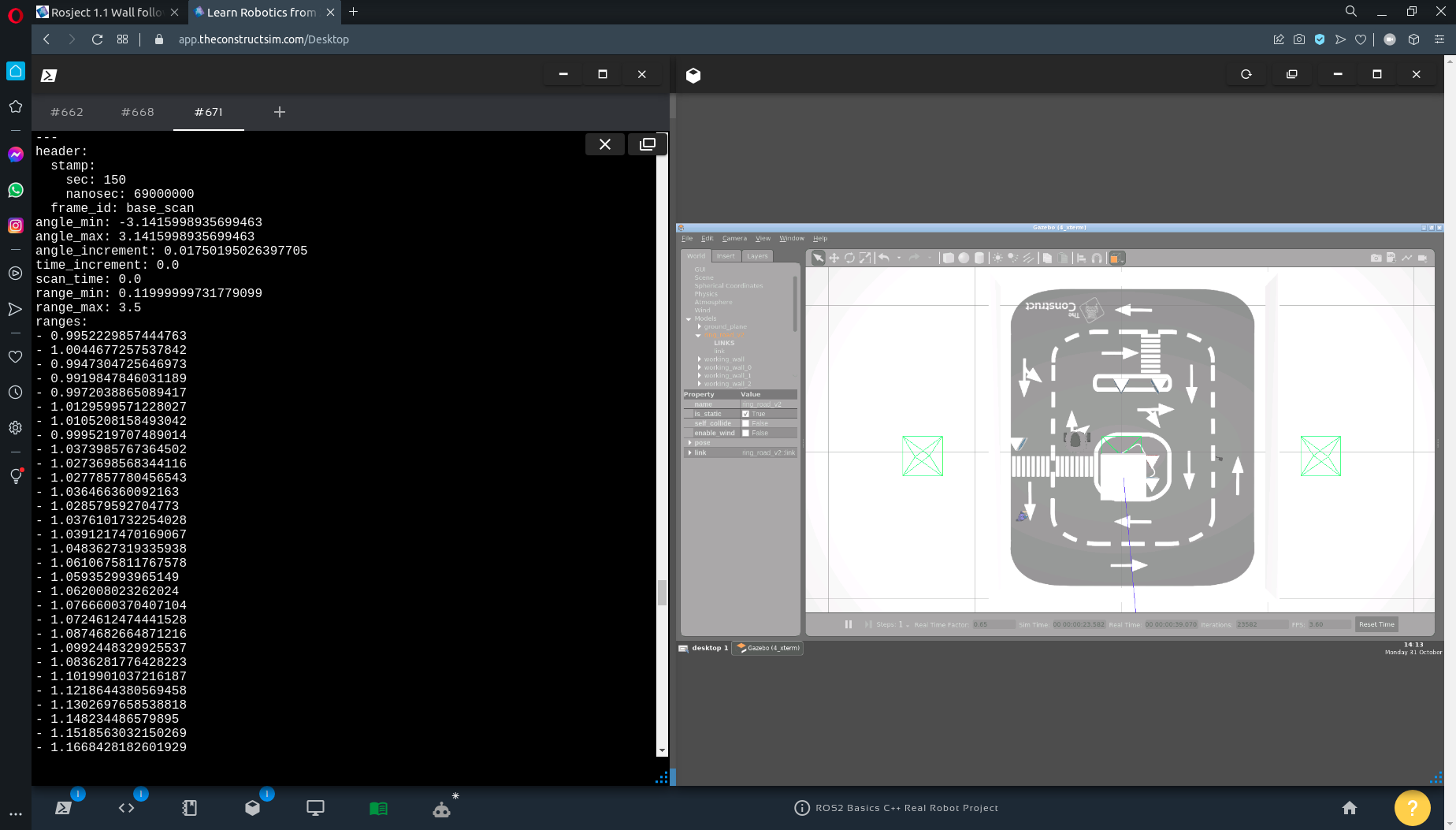
when doing this
ros2 topic echo /scan
I see this long message
Traceback (most recent call last):
File "/opt/ros/foxy/bin/ros2", line 11, in <module>
load_entry_point('ros2cli==0.9.9', 'console_scripts', 'ros2')()
File "/opt/ros/foxy/lib/python3.8/site-packages/ros2cli/cli.py", line 67, in main
rc = extension.main(parser=parser, args=args)
File "/opt/ros/foxy/lib/python3.8/site-packages/ros2topic/command/topic.py", line 41,in main
return extension.main(args=args)
File "/opt/ros/foxy/lib/python3.8/site-packages/ros2topic/verb/echo.py", line 81, in main
return main(args)
File "/opt/ros/foxy/lib/python3.8/site-packages/ros2topic/verb/echo.py", line 95, in main
message_type = get_msg_class(node, args.topic_name, include_hidden_topics=True)
File "/opt/ros/foxy/lib/python3.8/site-packages/ros2topic/api/__init__.py", line 88, in get_msg_class
msg_class = _get_msg_class(node, topic, include_hidden_topics)
File "/opt/ros/foxy/lib/python3.8/site-packages/ros2topic/api/__init__.py", line 133,in _get_msg_class
return get_message(message_type)
File "/opt/ros/foxy/lib/python3.8/site-packages/rosidl_runtime_py/utilities.py", line30, in get_message
raise ValueError("Expected the full name of a message, got '{}'".format(identifier))
ValueError: Expected the full name of a message, got 'sensor_msgs/msg/LaserScan'