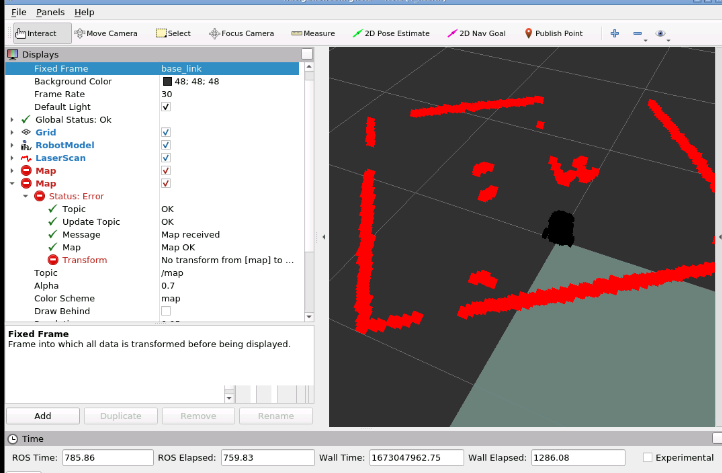
I am at Seciton 2 of the Navigation ROSDS and i am trying to launch the amcl node. When i opened rviz i got “unknown frame map” error, so i changed the fixed frame to base_link and the error went away, but now i cant visualize the published map
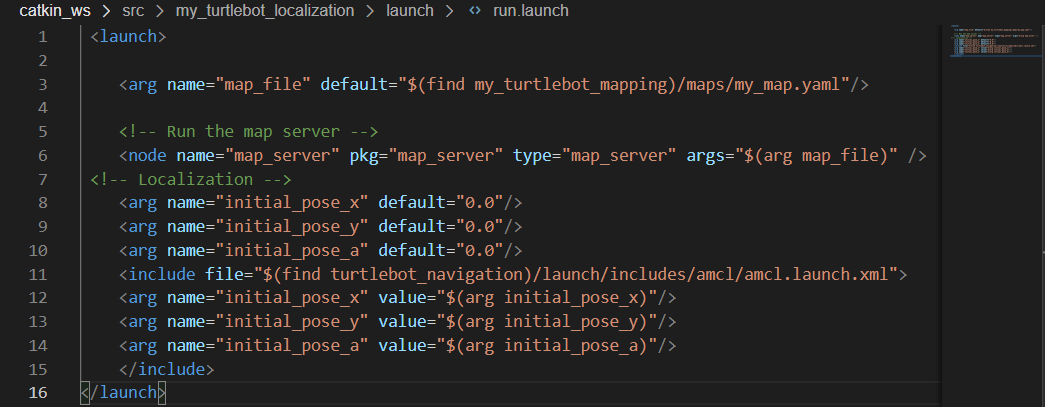
This is my launchfile:
I am thankful for any help 
Hi @woeberinroslol ,
I just completed this project and I believe that “Fixed Frame” must always be map. If you use base_link or base_footprint it will most likely not work.
Try doing things in this order:
- Start real robot turtlebot simulation in first terminal (wait for gazebo to launch)
- Start teleop in second terminal
- Launch your localization launch file in third terminal
- Once AMCL is started and running, then start rviz in fourth terminal.
- Once Rviz loads, open the saved rviz config for localization.
- Run the teleop to move the robot and localize the robot on the map.
This is what I always follow and has worked for me.
Try this and let me know if your problem is fixed.
Regards,
Girish
Thank you, I will try this as soon as i can