I just created a fresh copy of the course project for the “ROS2 Basics in 5 Days” course and started following the first steps of the course description. Unfortunately they do not work as described:
-
When executing “source ~/simulation_ws/install/setup.bash” I get the first error “not found: “/home/user/ros2_ws/install/turtlebot3_node/share/turtlebot3_node/local_setup.bash””
-
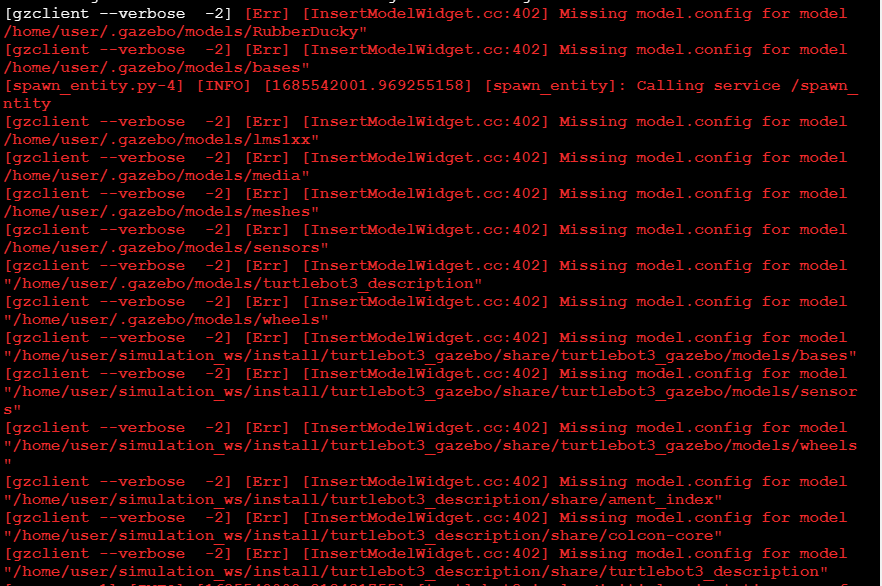
When executing “ros2 launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml” the Gazebo simulation launches, however there are several error messages in the terminal
-
When executing “source ros2_ws/install/setup.bash” I get the same error “not found: “/home/user/ros2_ws/install/turtlebot3_node/share/turtlebot3_node/local_setup.bash””
-
When executing “ros2 run turtlebot3_teleop teleop_keyboard” this does not work and I get the following output in the terminal:
user:~$ ros2 run turtlebot3_teleop teleop_keyboard
Traceback (most recent call last):
File “/home/user/ros2_ws/install/turtlebot3_teleop/lib/turtlebot3_teleop/teleop_keyboard”, line 33, in
sys.exit(load_entry_point(‘turtlebot3-teleop==2.1.1’, ‘console_scripts’, ‘teleop_keyboard’)())
File “/home/user/ros2_ws/install/turtlebot3_teleop/lib/turtlebot3_teleop/teleop_keyboard”, line 25, in importlib_load_entry_point
return next(matches).load()
File “/usr/lib/python3.8/importlib/metadata.py”, line 77, in load
module = import_module(match.group(‘module’))
File “/usr/lib/python3.8/importlib/init.py”, line 127, in import_module
return _bootstrap._gcd_import(name[level:], package, level)
File “”, line 1014, in _gcd_import
File “”, line 991, in _find_and_load
File “”, line 975, in _find_and_load_unlocked
File “”, line 671, in _load_unlocked
File “”, line 848, in exec_module
File “”, line 219, in _call_with_frames_removed
File “/home/user/ros2_ws/install/turtlebot3_teleop/lib/python3.8/site-packages/turtlebot3_teleop/script/teleop_keyboard.py”, line 60, in
TURTLEBOT3_MODEL = os.environ[‘TURTLEBOT3_MODEL’]
File “/usr/lib/python3.8/os.py”, line 675, in getitem
raise KeyError(key) from None
KeyError: ‘TURTLEBOT3_MODEL’
How do I get this running in order to test my own package?
Thank you
Ralf