Hi Construct-Team,
i have a problem with the ros2 teleop_keyboard in the gazebo simulation. I cant teleoperate the turtlebot3, i followed the construction in Part 1.
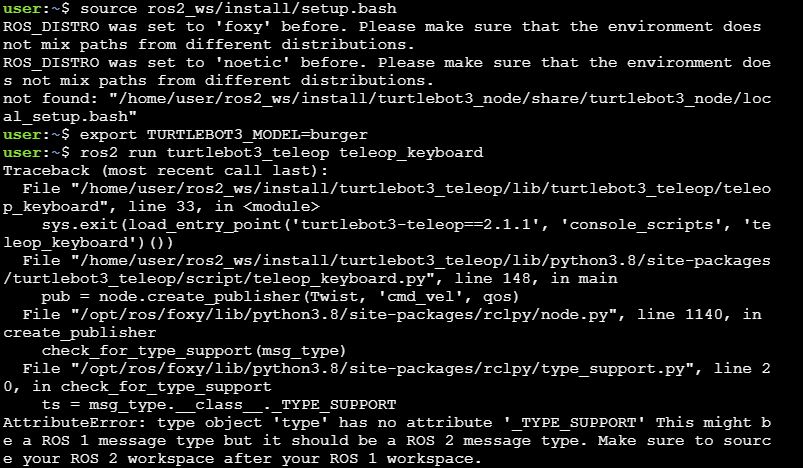
Here are the shell output:
Hi Construct-Team,
i have a problem with the ros2 teleop_keyboard in the gazebo simulation. I cant teleoperate the turtlebot3, i followed the construction in Part 1.
Here are the shell output:
Hi @mosgaed ,
Welcome to this Community!
To run Teleop for TurtleBot3 in ROS2 rosject, you must use the following commands:
cd ~
source /opt/ros/noetic/setup.bash
source ~/simulation_ws/devel/setup.bash
rosrun turtlebot3_teleop turtlebot3_teleop_key
Let me know if this worked for you!
Regards,
Girish
This topic was automatically closed 10 days after the last reply. New replies are no longer allowed.