Hi I am doing the rosject in ROS Navigation in 5 days, but the local costmap just doesn’t show up for me. Can someone look at my code and see where is wrong? I have been debugging this and it still doesn’t work.
Yes I’ll have a look. Please share here your rosject, but clearly indicate the steps that you are doing in order to see the costmap. Include screen captures of your results
Thanks you very much for your help.
This rosject shows that it is private, how can I share it?

Sorry about the fuss here, I didn’t solve this problem last night because of time is late (wanted to go to sleep). I just resolved it there was a typo in my code. Now I get the local_costmap. Thanks anyway!
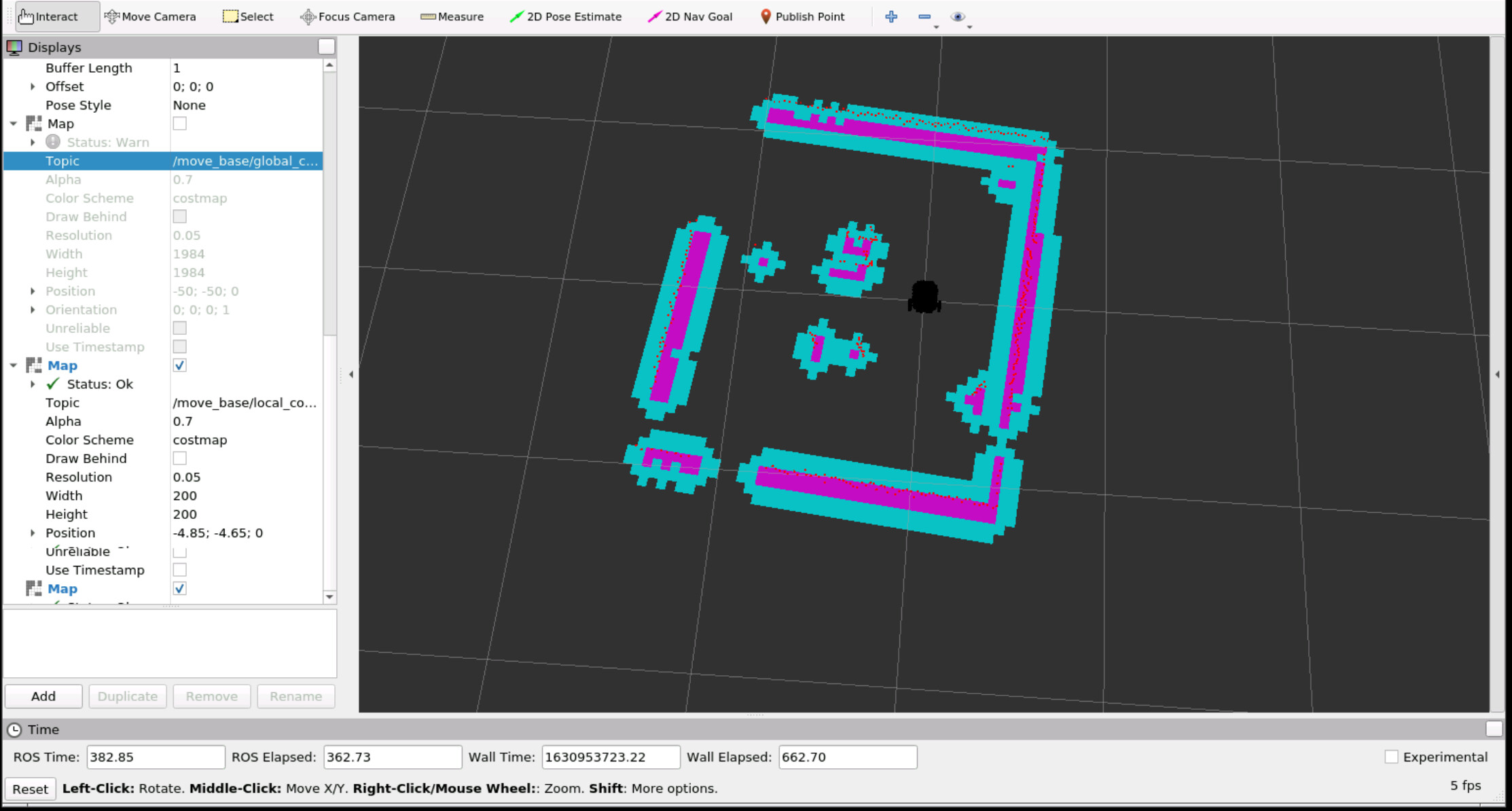
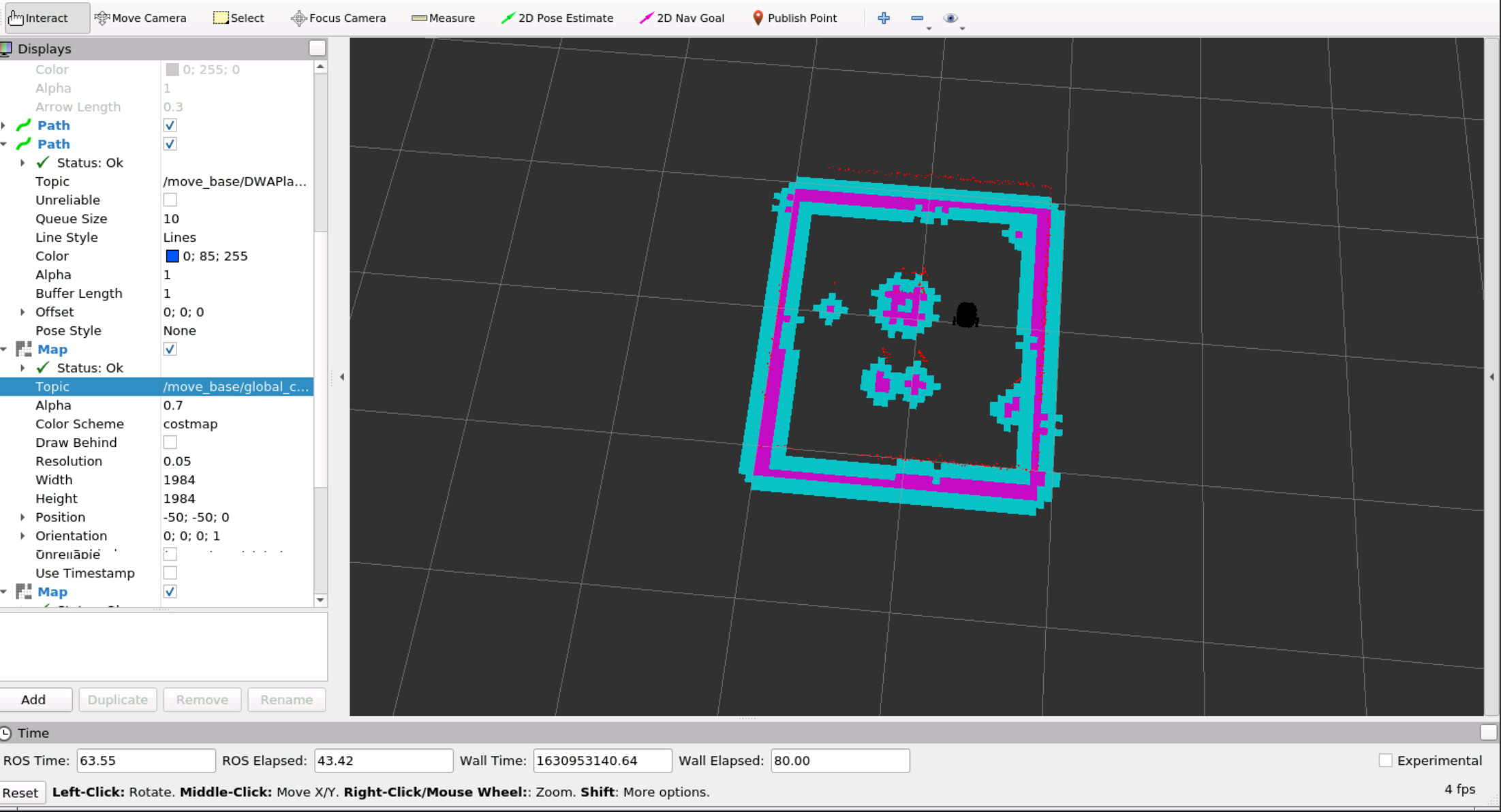
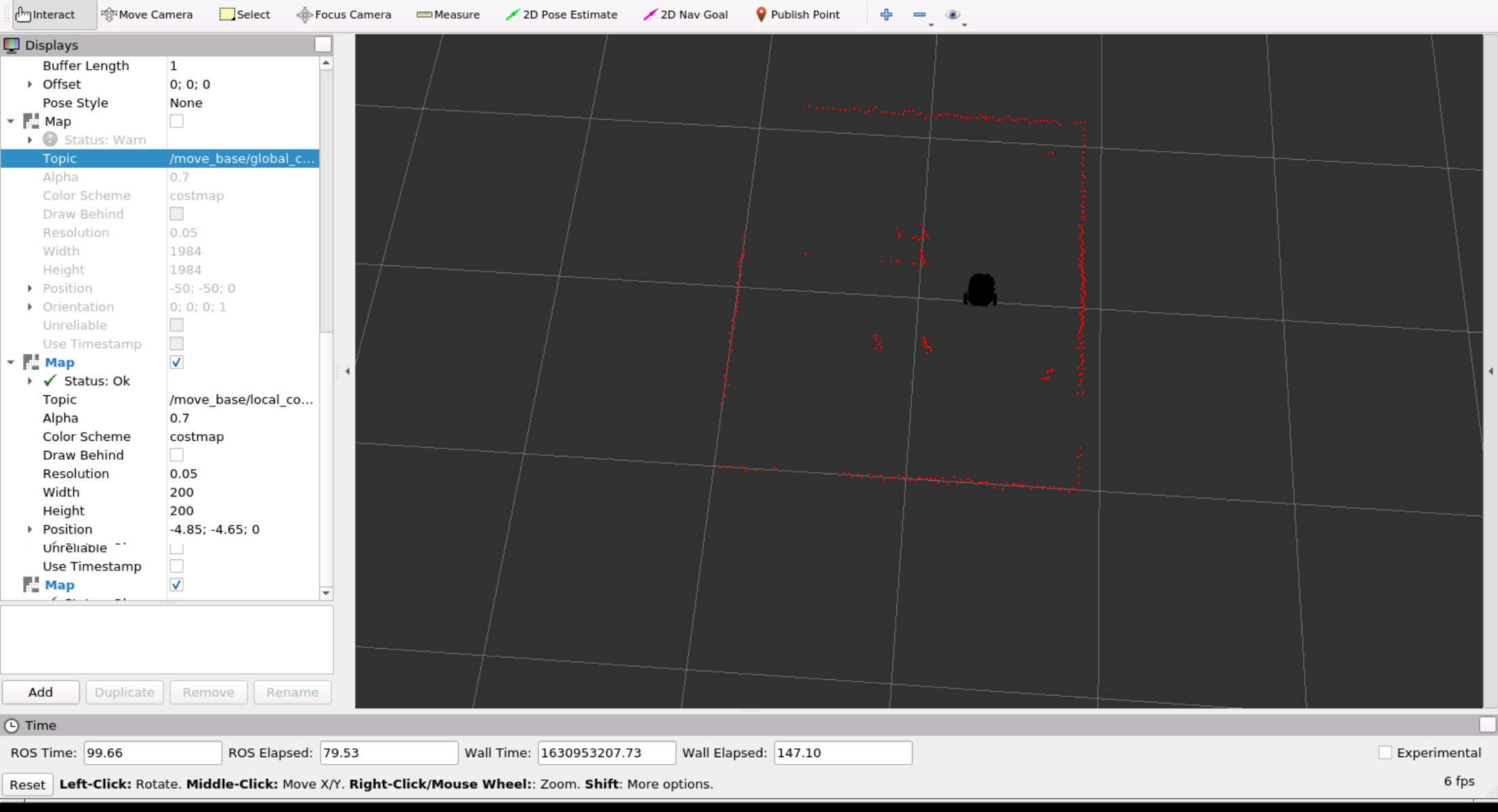
Sorry, still some problems on DWA.
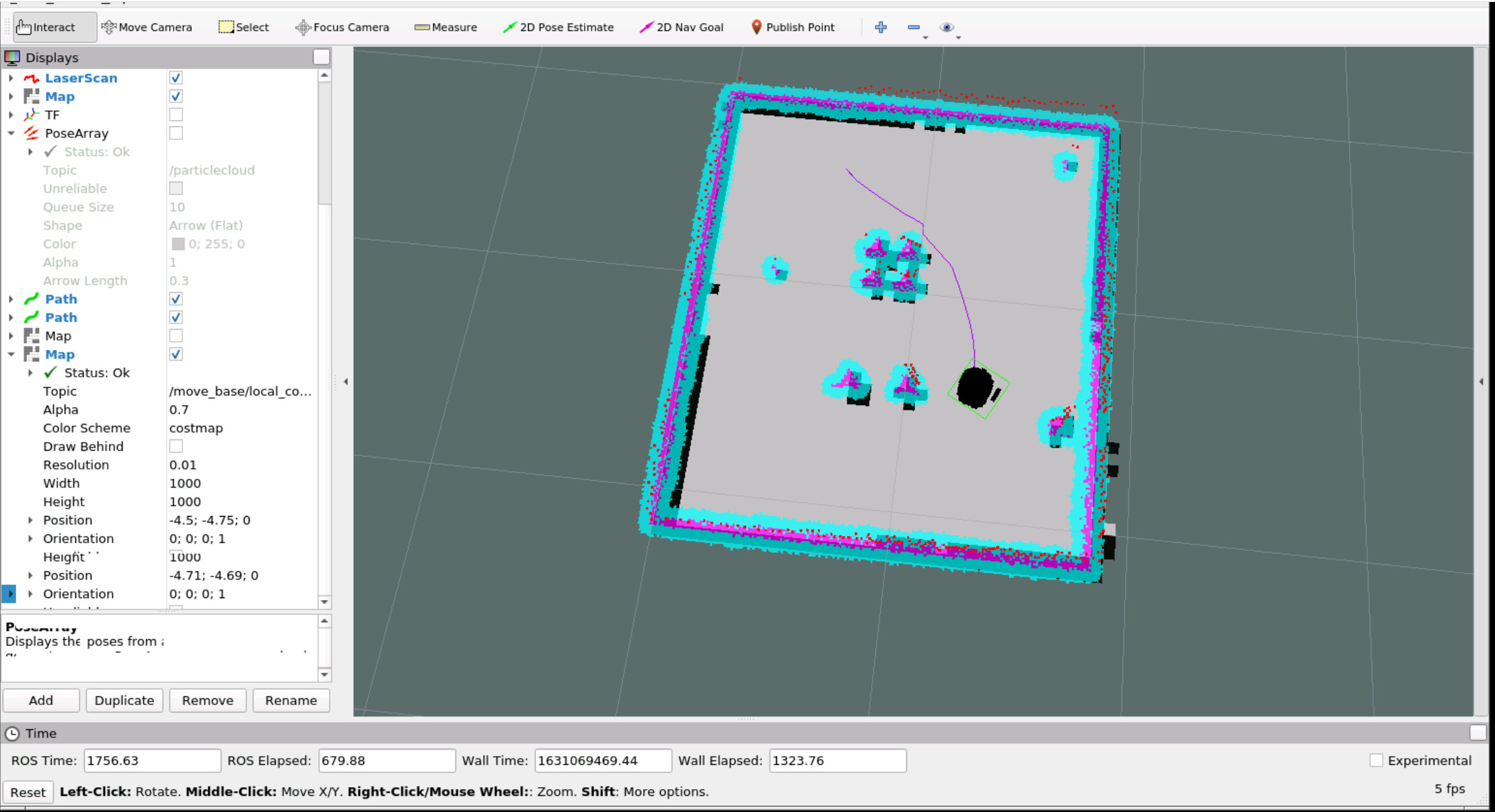
Now my code can generate a global plan (as in purple trajectory)
But it says
[ INFO] [1630954285.209069668, 695.696000000]: Got new plan
[ WARN] [1630954285.219015852, 695.701000000]: DWA planner failed to produce path.