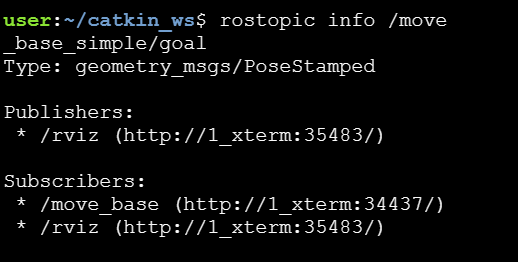
HI I am trying to custom trim the TB3 package of waffle_pi to implement Localization but my waffle_pi robot is not moving, when 2d nav goal is given in rviz. so I checked the rostopic /move_base_simple_goal and i see that rviz is being published and subscribed to rviz here
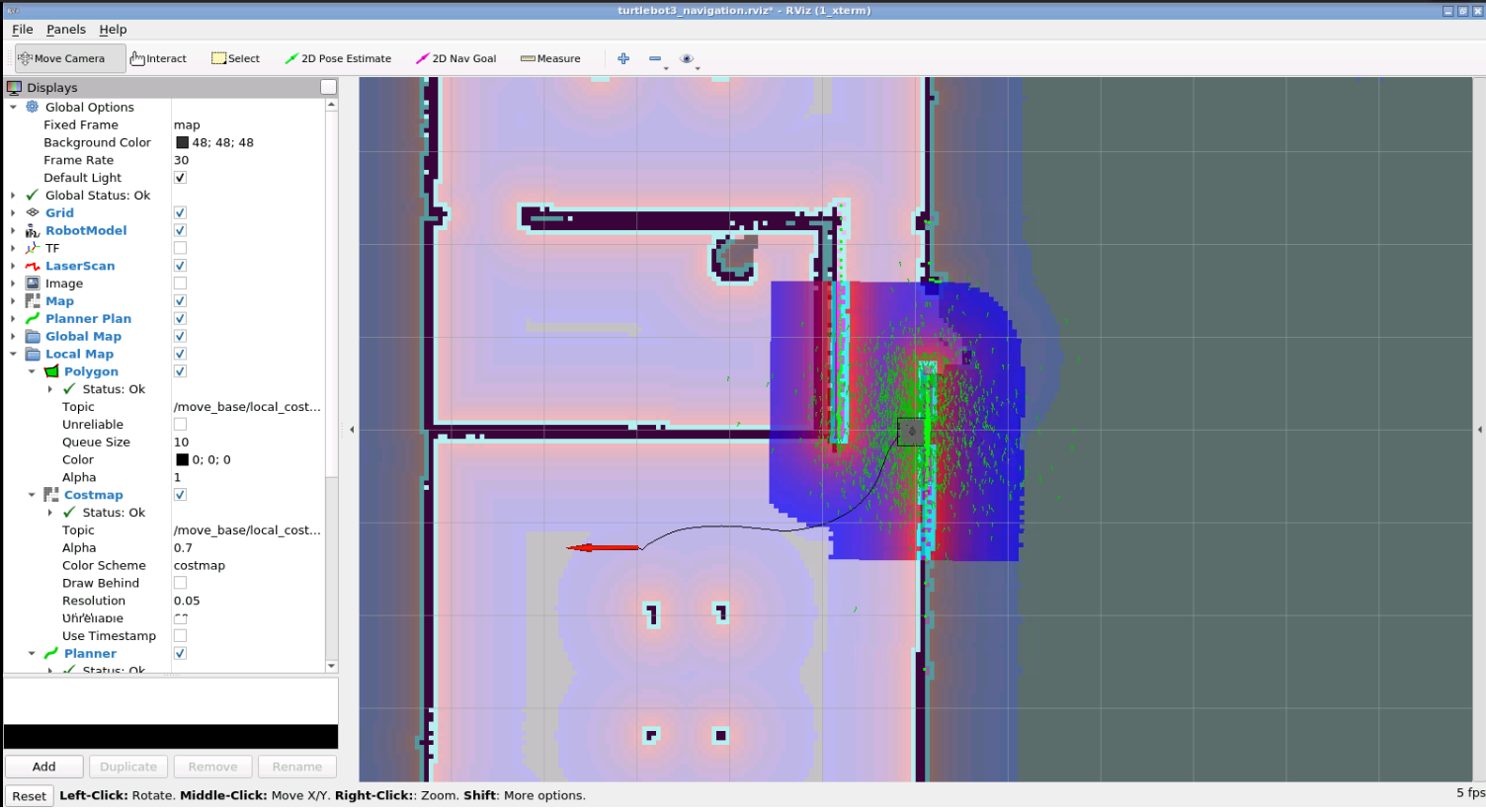
my Rviz :
rqt_graph :
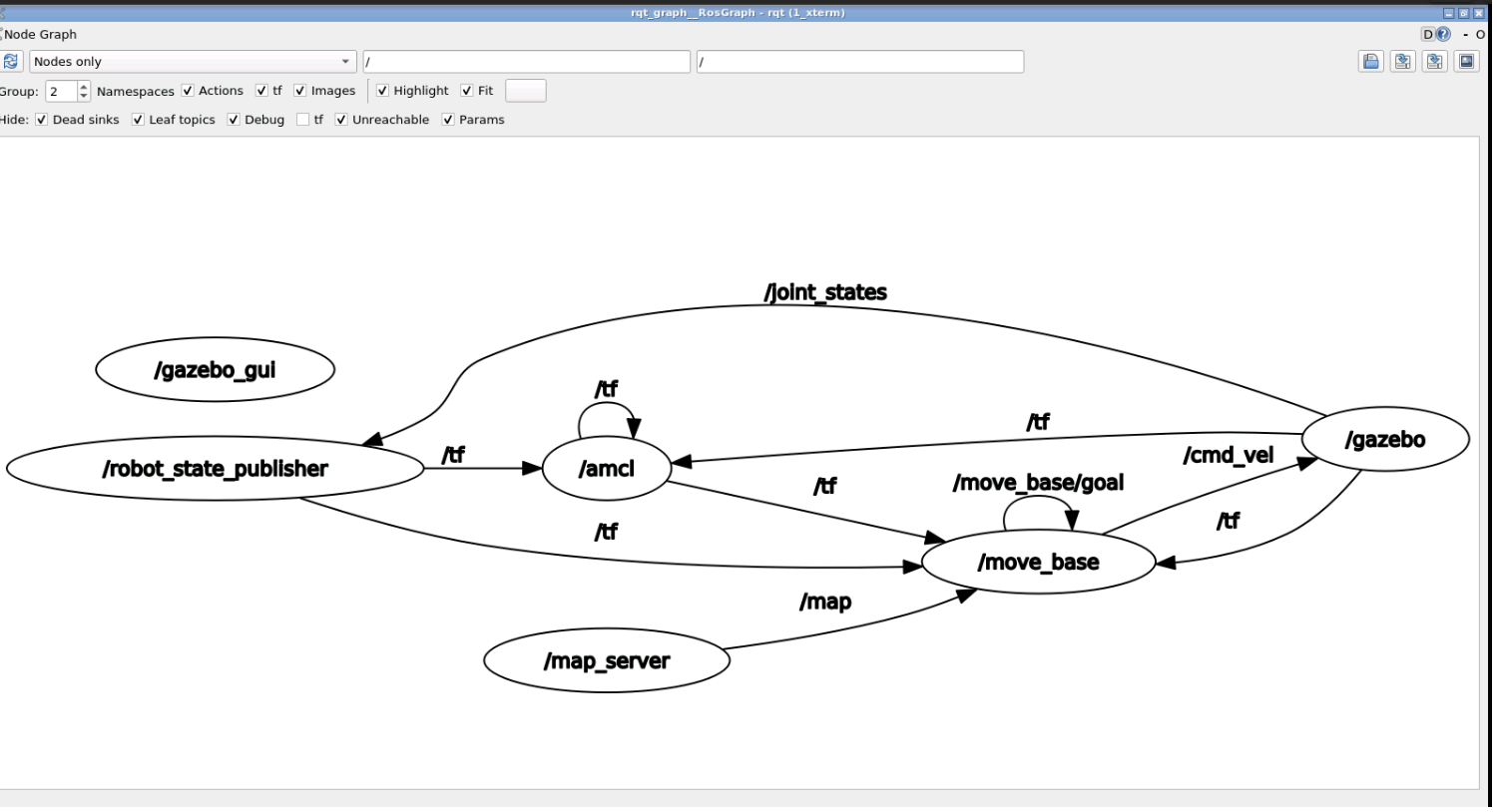
could anyone help me how to correct my error because I understand that map topic being subscribed and publishing to the topic is the problem here as I enters a loop and will never move. Any help would be highly appreciated.
Thank you,
-BG