after creating my custom controller, I managed to create my HAL and the next step would be to use both together. But in the examples I see that when executing
" which I’m not able to see the source file. How can I access to it? as the custom example controller from the previous chapter was to control one joint, I guess that this controller is able to control both joints of the RRbot
I can see these two parts inside the launch file named rrbot_hw_and_states.launch:
<arg name="controller_to_spawn" default="" />
<arg name="controllers_yaml" default="rrbot_controllers" />
...
...
...
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam command="load" file="$(find rrbot_bringup)/config/$(arg controllers_yaml).yaml" />
This means that launch file loading this config file rrbot_controllers.yaml located inside rrbot_bringup package.
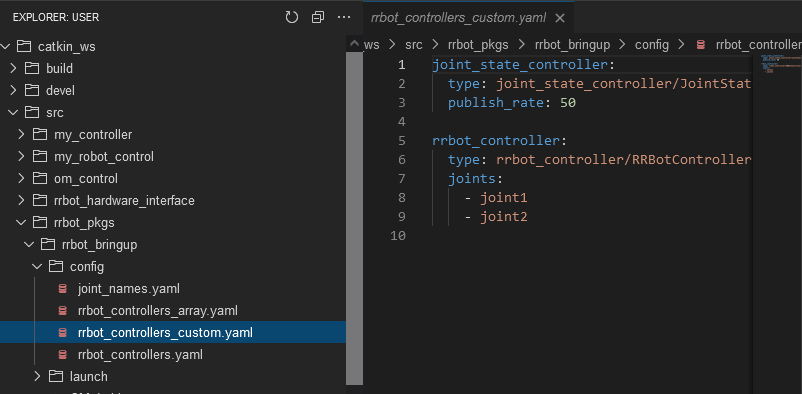
When I display the content of rrbot_controllers.yaml I get this:
So I can’t find the call to rrbot_controller/RRBotController that you are refering to. Could you please guide me more in detail to where that call is located?
thank you for pointing me to the file where the rrbot_controller/RRBotController is being used.
Actually the correct name for the controller is my_controller/PositionController. This is the custom controller created in Unit 4.
So looking at Unit 4 we see that we can modify the file rrbot_controllers_custom.yaml` and replace its content with this:
Ohh, okey thank you so much! I appreciate this, and now makes complete sense for me!
I have a another question about this module. There is a more advance ros_control module or this is the only one? I’m very interested in learning more about this ROS topic
Thank you so much, this course was very helpful for me
I am glad you liked it. I can point you to ros2_control which not just a port of ros_control to ROS2 but a complete re-write from scratch. It has some more advanced features such as lifecycles, this is a type of state machine that allows to easily start/stop/reconfigure the controller. New features on the roadmap include asynchronous controllers, controller chaining and others. But it is compatible with ROS2 only, not ROS1.