and now it works but I actually don’t understand what I did here what does sourcing the setup means? why can’t find it by itself?
and will be happy for some info
That was my stupid typo blunder. Sorry for that. I have now fixed it on my earlier post.
Anyway, here it is again (spell checked twice):
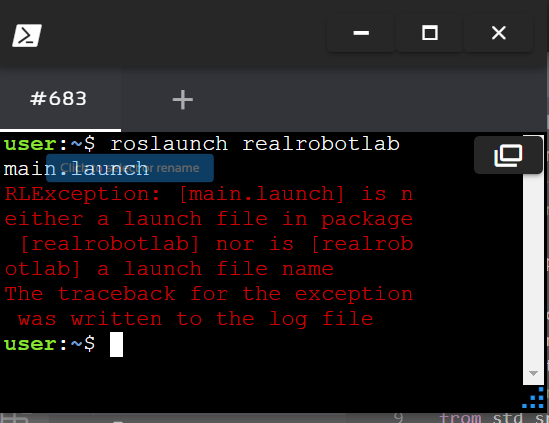
roslaunch realrobotlab main.launch
You have the same exact line on the rosject notebook notes. If my command did not work, you could have at least copy-pasted it from the rosject notebook!
If you are working on a ROS(1) rosject, you do not have to source your ROS version. It is already done for you every time you open a fresh terminal window.
You are basically selecting the version of ROS on the computer to execute the package you wish to run.
You can have more than one version of ROS installed in your computer. You can also have ROS2 installed along with ROS(1). So, sourcing will just help your computer understand which ROS version to execute your package.
This is already done in your ROS rosject. Every time you open a terminal window, ROS version is sourced automatically. This is only in the ROSDS environment. This may not happen in your own personal computer.
I think there might be a problem with your rosject files.
Try to delete the rosject and fork it again.
To delete: Go to your homepage, go to My Rosjects, click on the ROS Basics Python Rosject and once the popup window loads, you can find the red “trash can” symbol. Click on this symbol to delete the rosject.
To fork the rosject again: Open ROS Basics in 5 Days Python course again. Go to any of the chapters that tell you to “click the link” to get a copy of the rosject. Get a new version of the same rosject again.