Hi, I’m currently stuck at the project part1 where we have to program a wall following robot. I have implemented a node that has subscribed to the /kobuki/laser/scan and published to the topic /cmd_vel . In order to get an idea about the laser range, I have printed out values corresponds to 0, 90 and 180 degrees. But that does not give any output. I will attach the implemented code herewith, let me know if it is against the community guidelines.
Thanks in advance!
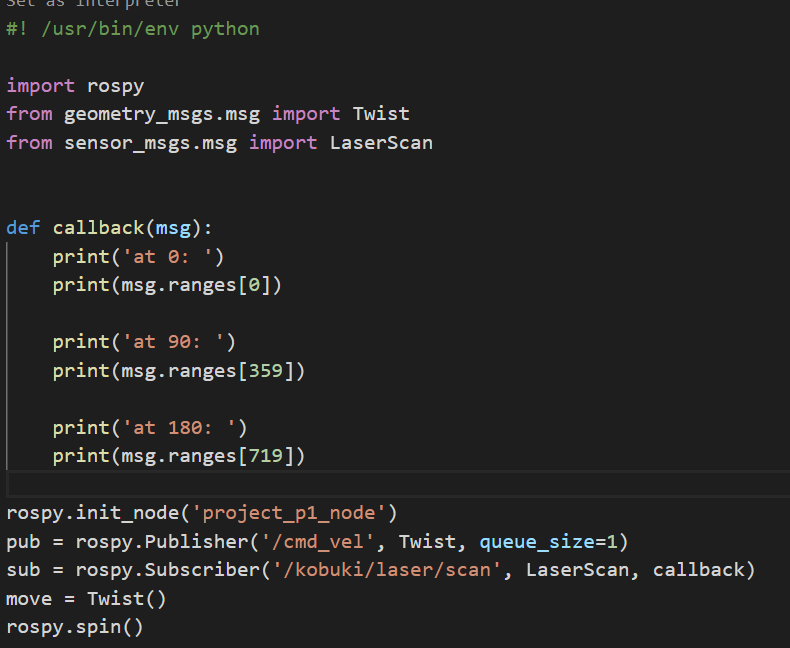
Hi @Kavindu99, the topic in the turtlebot simulation is called /scan. Changing your subscriber should solve the issue
Thanks! It is working now