Hi,
It states there that there is no transformation of the map frame to the rest of the TF tree. It might be an issue with the localization?
Could you check that? You might have the names wrong, or not have the correct script running? Or might be configuration issue, although if you generated the map, at least that should work, but the localization seems that has something wrong there
Please tell me how and where to check map frame?
OK I will create the map one more time perfectly and will check. Thanks for your reply
Hello @dhanaprakaashg,
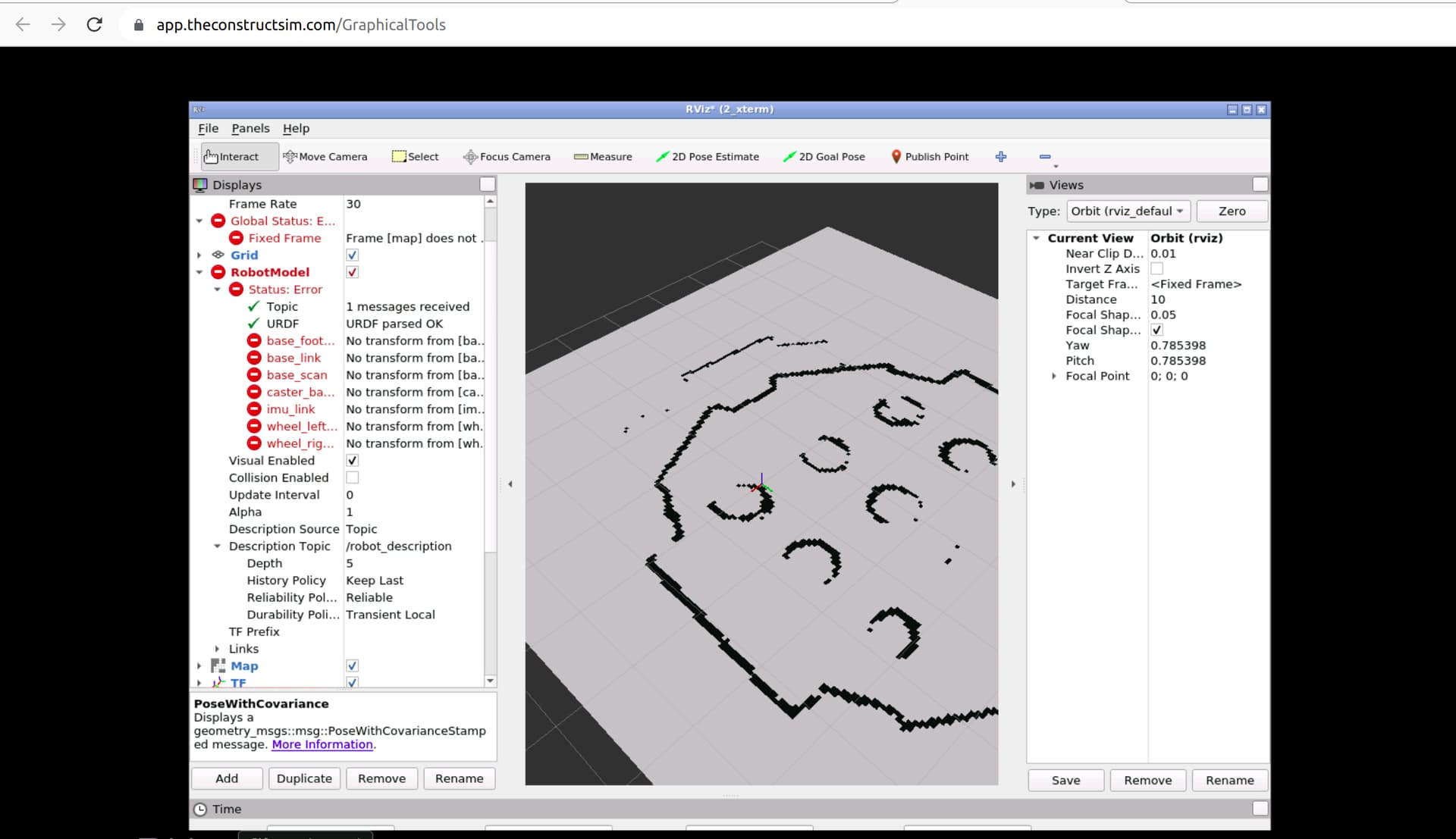
in Rviz there is a “Displays” panel on the left that includes only “Global Options,” “Global Status,” and “Grid”. Note how under “Global Status” there is an error message that says: Fixed Frame: Frame [map] does not exist.
This is important: In order to to see any of the coordinate frames in Rviz you must choose a Fixed Frame where the accordingly named TF frame exist.
In the course AMCL is the node that broadcasts the /map TF frame, so apparently AMCL is not running, its configuration is not right or you have not provided the initial state estimate.
Once you confirm that AMCL is running, you have to provide a 2D pose estimate using RVIZ. How to do this is described under Manually provide the initial localization. With this initial state estimate AMCL will be able to publish the map TF frame.
Hope this helps,
Roberto