Hi,
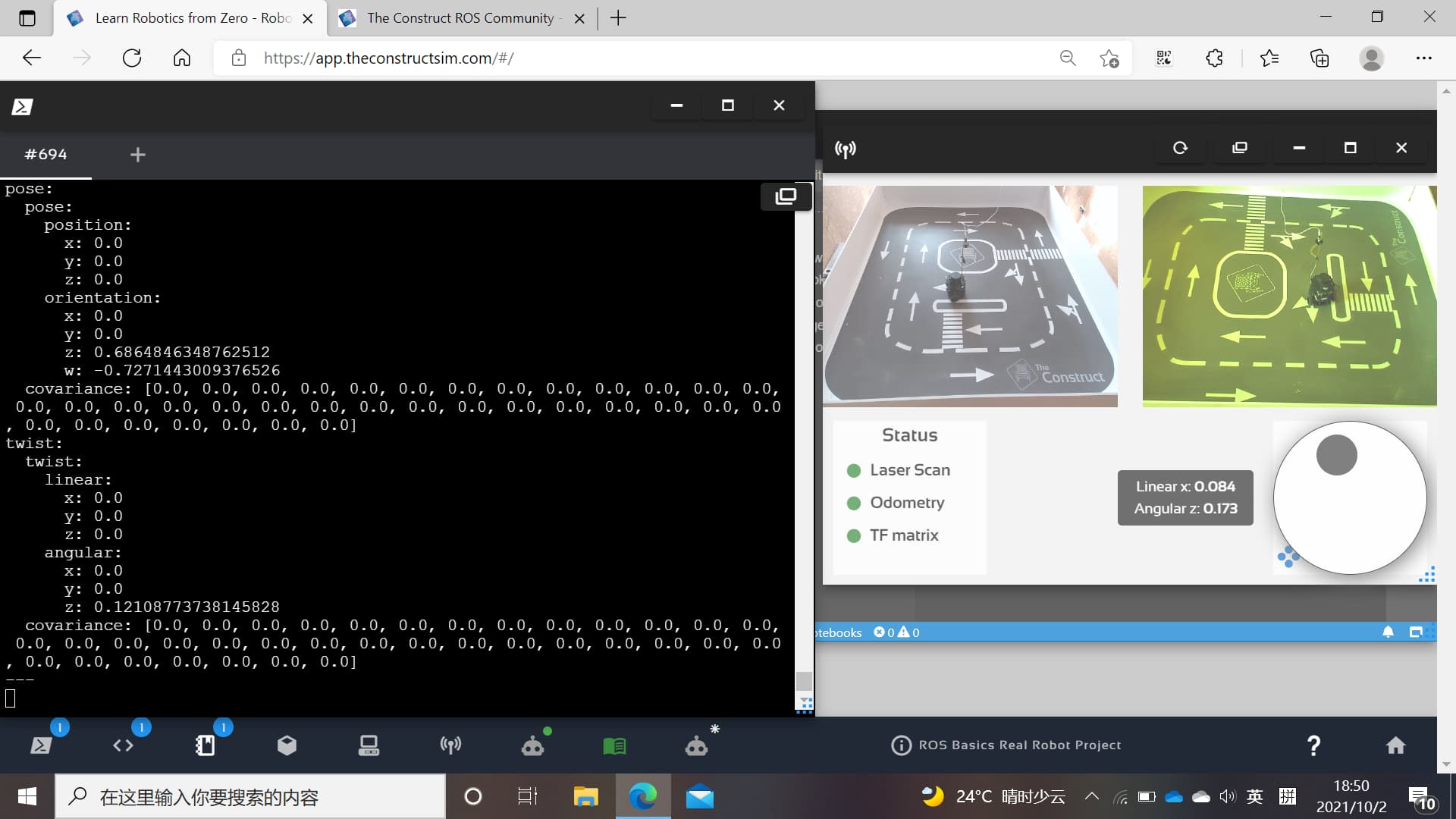
Can someone check that if there is something wrong with reading the odometry of the real turtlebot3 robot? In the following picture, when I enter rostopic pub /odom, it gives me the following output:
Thank you for bringing this to my attention. This was an error with the TurtleBot3 Hardware, and it is now fixed. Please let me know if this problem persists, as this will tell me that a hardware change is necessary.
@roalgoal, I can also confirm that odometry is not working correctly (topic /odom). There is also something strange on topic regarding wheel status (positions/velocity/effort) - position is fixed while velocity is unstable around 0.5 even if the /cmd_vel is set to 0. I guess that there must be a hardware problem, probably with encoders?
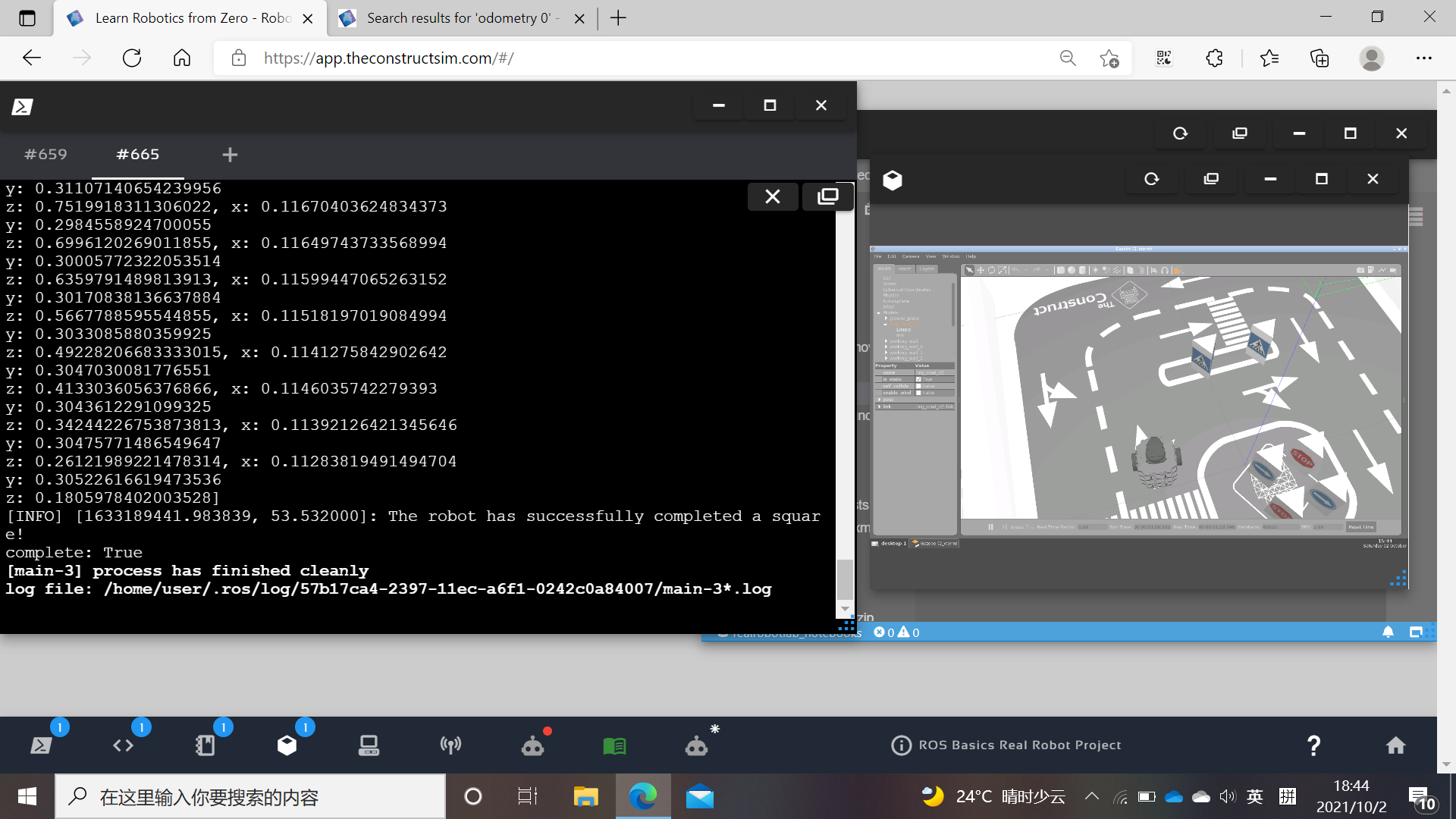
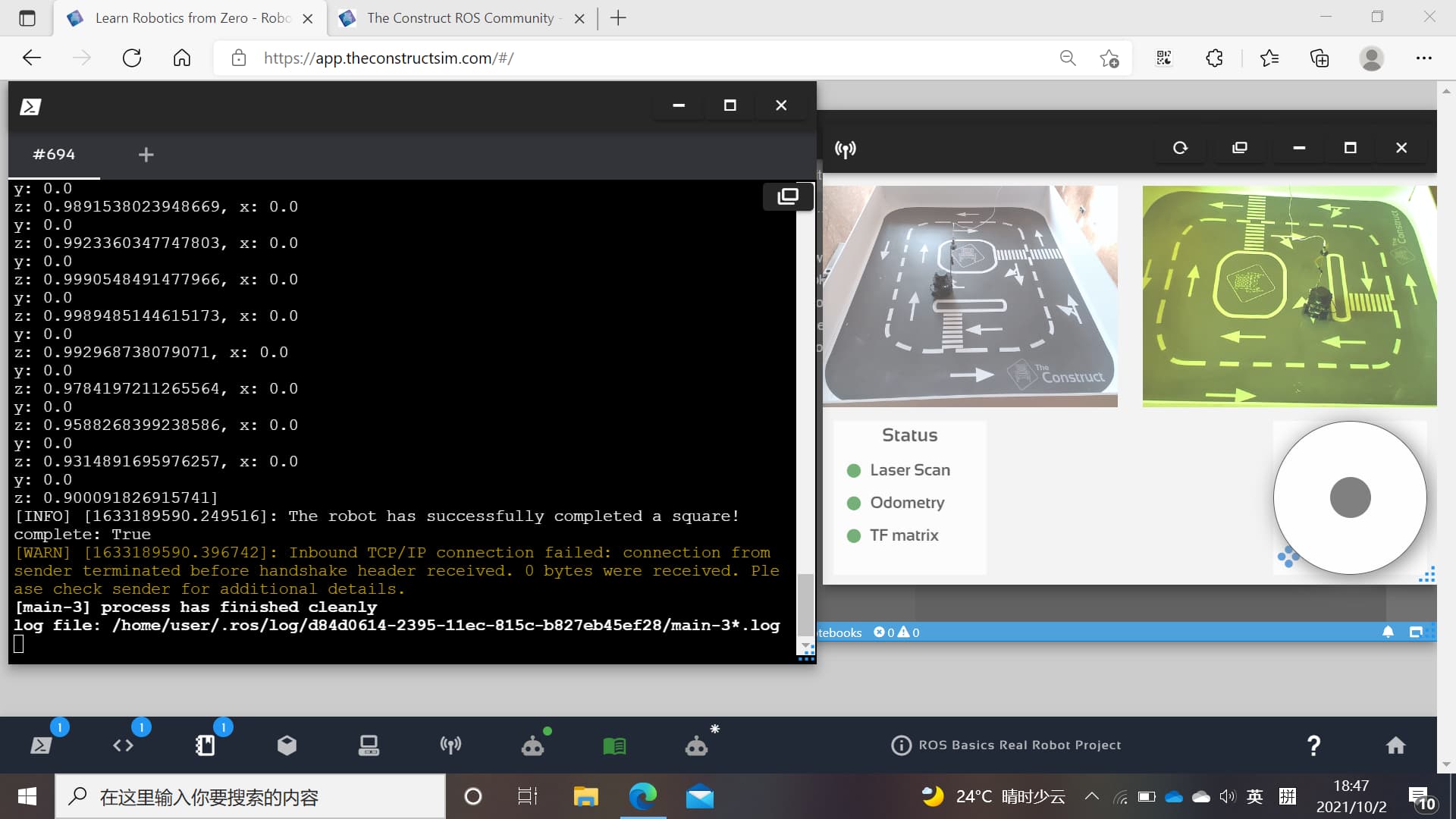
@roalgoal, I am sorry, but /odom is still returning 0 for pose.pose.positions. Also, I had some problems with the connection between the robot and the joystick which I solved by reconnecting to the robot. While moving in a straight line motion of the robot was quite jerky, as that joystick was “losing signal” and randomly sending 0 while velocity in twist was 0.1.
Hi, you are correct, the odometry topic is still not publishing. Sorry for the inconvenience, we will replace the hardware as soon as possible. I will let you know as soon as it is done.
In the meantime, if you are working on a course rosject, you only need to show that the sections that need odometry work in the simulation.