Hi,
Currently, I am working on Unit 6: Project.
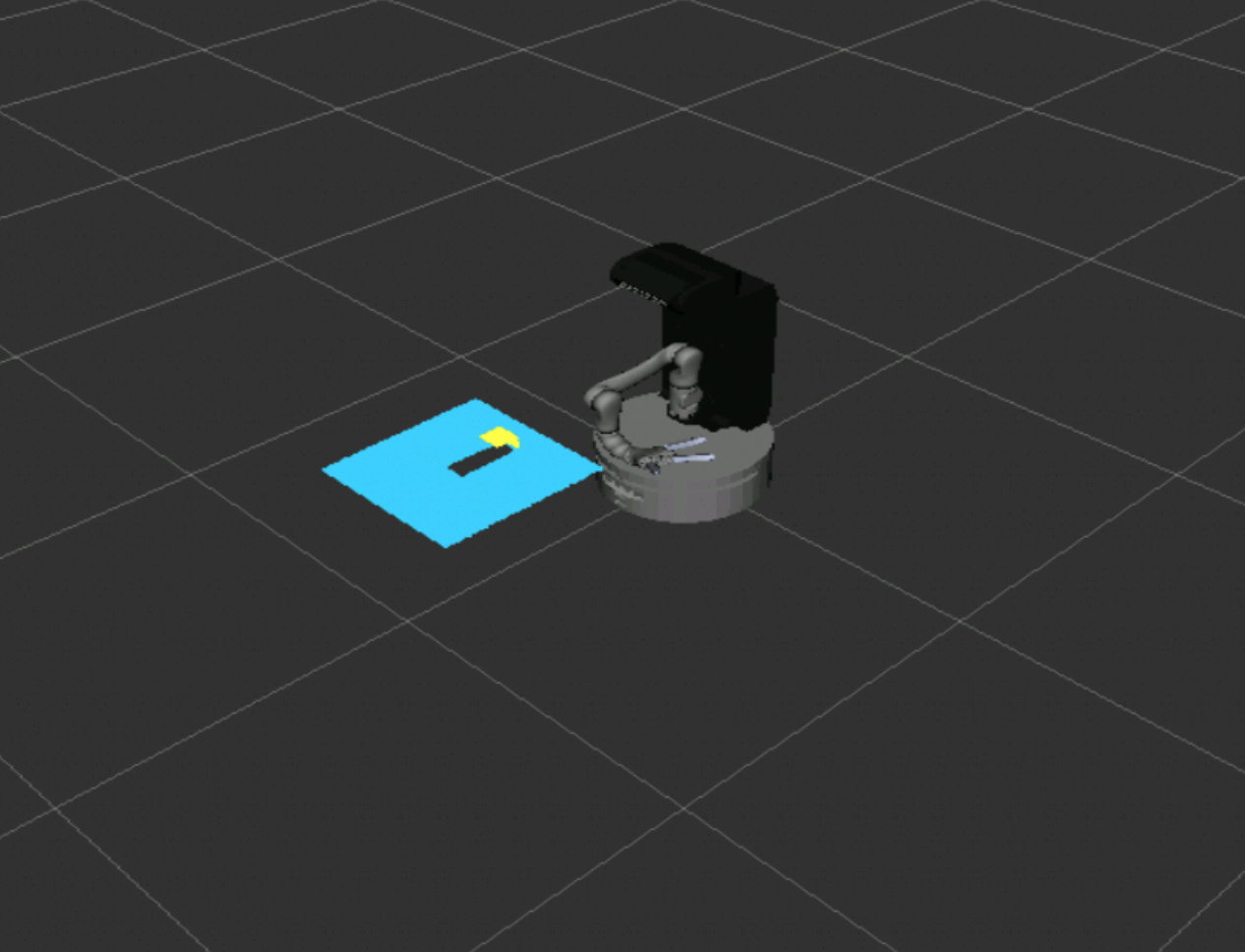
This is my environment setting in simulation
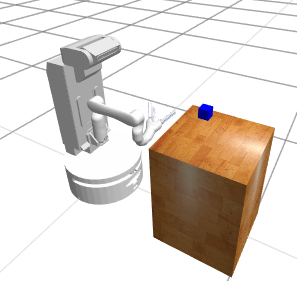
I was trying to detect a cube with “basic_grasping_perception.cpp”.
I assumed I only need to modify name of subscribe topic for cloud data from the RGBD camera
This is what I did.

Then, I launched basic_perception_dbg.launch file.
![]()
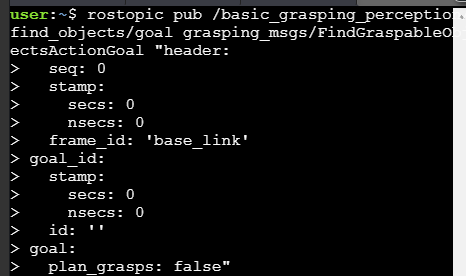
And then I wanted to see if the robot detected the cube.
To do so, I did the following.
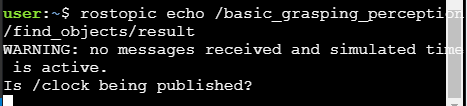
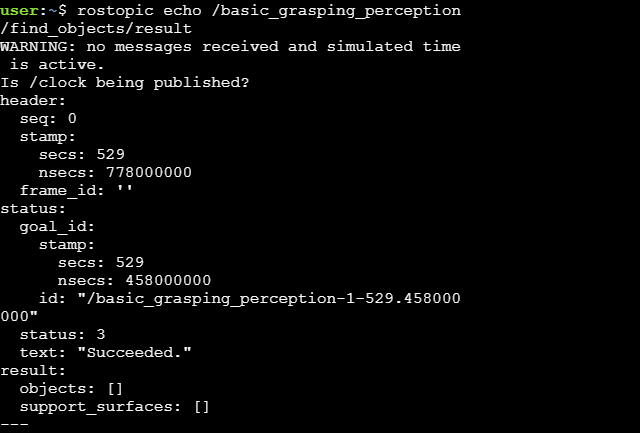
It said the process succeeded, but there is no detected object and surface.
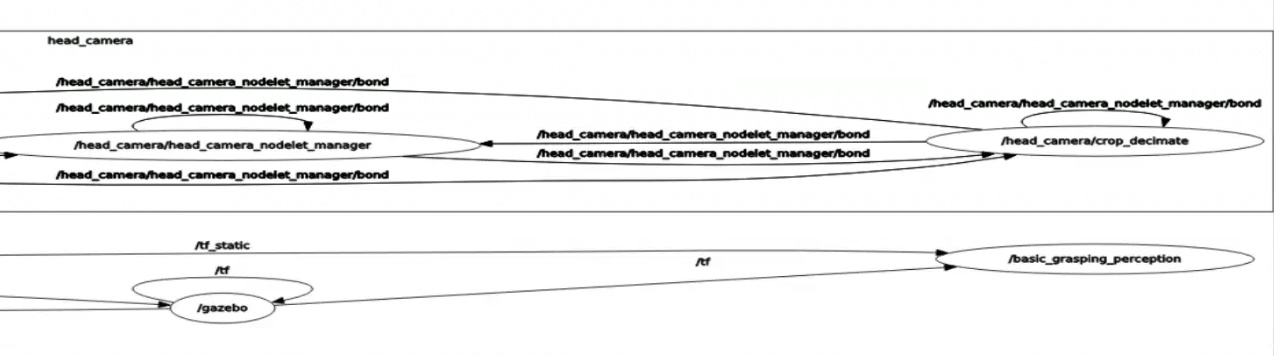
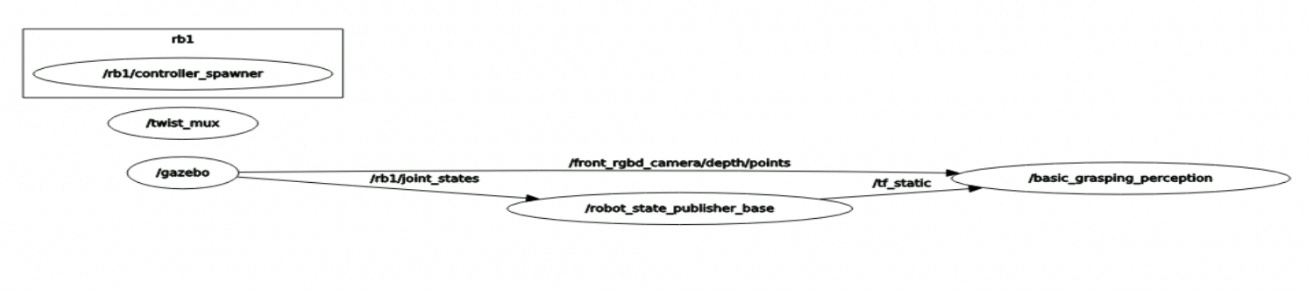
Also, I realize that there are no camera-related nodes in this simulation when I check rqt_graph while there are many of camera-related nodes in fetch robot simulation at unit 5: Grasping.
e.g. rqt_graph for fetch robot in unit 5
e.g. rqt_graph for rb1 robot in unit 6
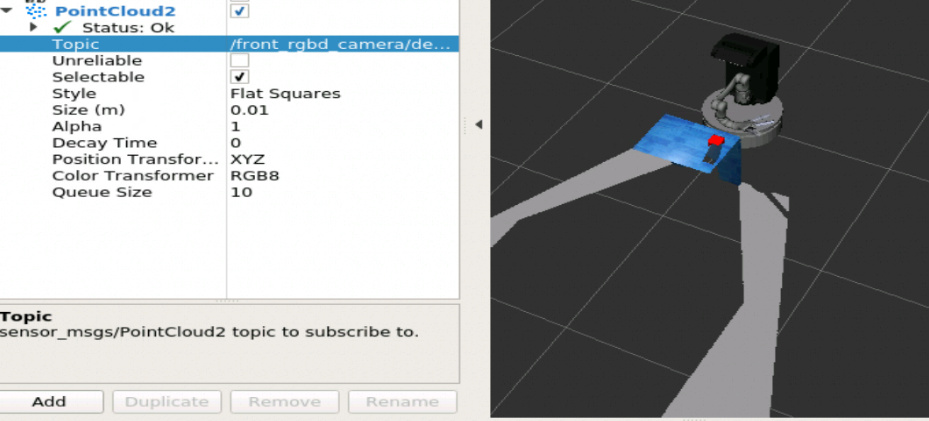
However, I do see the camera on my robot can see the objects( table and cube).
I don’t know what went wrong and what is going on here.
Can I get some help?
Also, I realize nobody answers my posts recently. I hope you guys take care of our posts more often.
Thanks.