Hello,
I am trying to do mapping part of the project ros2 navigation.
In my project_mapping package which is in ros2_ws workspace, i created launch file named cartographer.launch.py in the launch directory as below;
import os
from launch import LaunchDescription
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import Node
def generate_launch_description():
cartographer_config_dir = os.path.join(get_package_share_directory('project_mapping'), 'config')
configuration_basename = 'cartographer.lua'
return LaunchDescription([
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': True}],
arguments=['-configuration_directory', cartographer_config_dir,
'-configuration_basename', configuration_basename]),
Node(
package='cartographer_ros',
executable='occupancy_grid_node',
output='screen',
name='occupancy_grid_node',
parameters=[{'use_sim_time': True}],
arguments=['-resolution', '0.05', '-publish_period_sec', '1.0']
),
])
my cartographer.lua file in the config directory is ;
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_footprint",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = true,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.min_range = 0.12
TRAJECTORY_BUILDER_2D.max_range = 3.5
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 3.0
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
POSE_GRAPH.constraint_builder.min_score = 0.65
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
-- POSE_GRAPH.optimize_every_n_nodes = 0
return options
i changed the setup.py of project_mapping as in the lesson;
from setuptools import setup
import os
from glob import glob
package_name = 'project_mapping'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'config'), glob('config/*')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='user',
maintainer_email='user@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
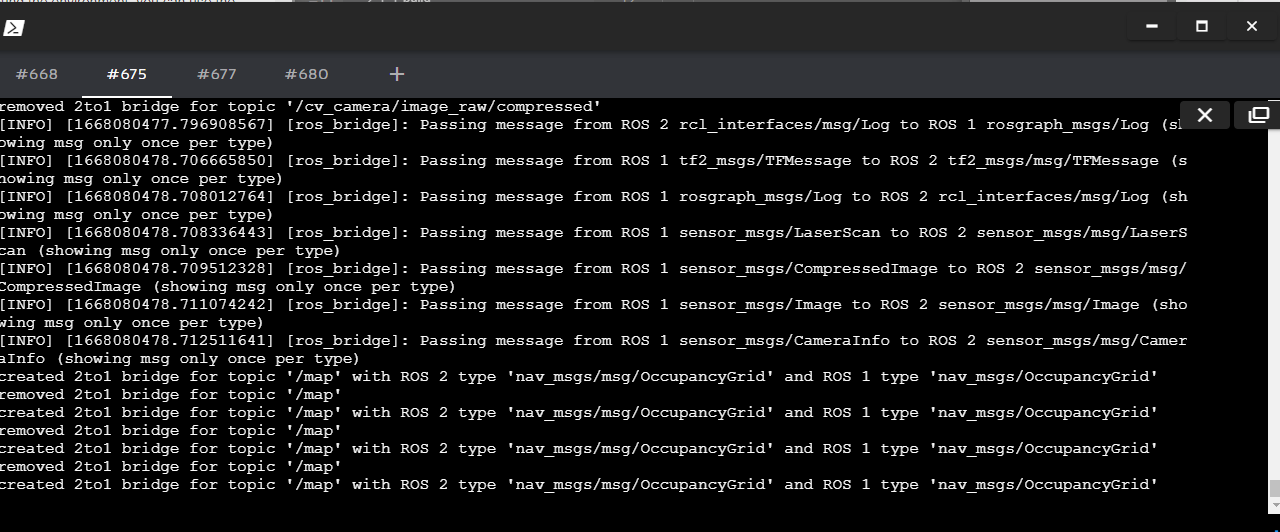
but when i launch the cartographer.launch.py i get an warning like below;
[occupancy_grid_node-2] [WARN] [1668015992.404121927] [occupancy_grid_node]: submap_slices and last_frame_id is empty

and in the rviz there is no map topic in the global options/fixed frame , and warning message saying “no map recieved” like in the image below
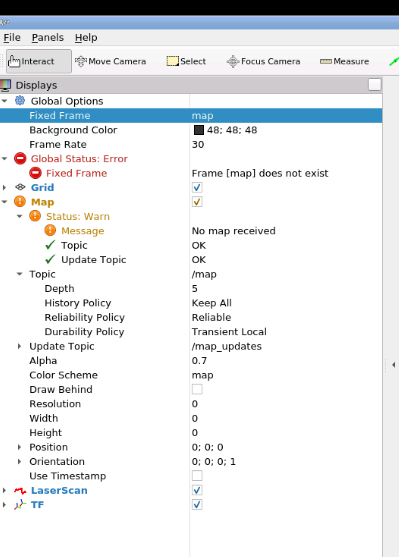
i could not figure out what may cause this problem , i hope anyone can give me an idea.
Thanks in advance.
Erdem