hello,
As I could not find the relevant files in the simulation environment, I found it impossible to follow the lectures when I was studying the course. For example, exercise4.1 b) the Xacro file named quadrotor_sensors.urdf.xacro could not be found.
Hi @zlwnge ,
The file can be found inside the package cvg_sim_gazebo, which can be located with ROS commands, check the example in the image below:
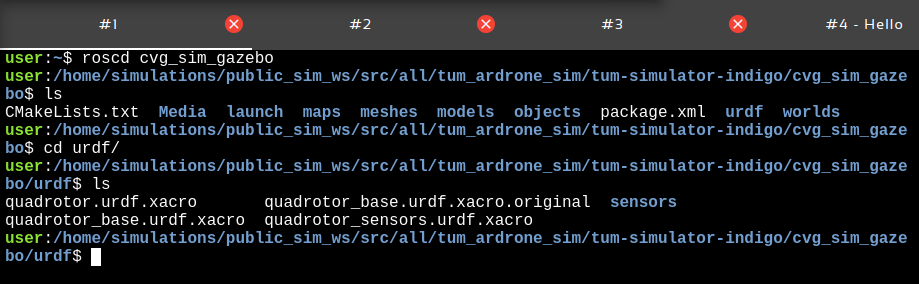
Please, let me know if you could find the files in the given path
Regards
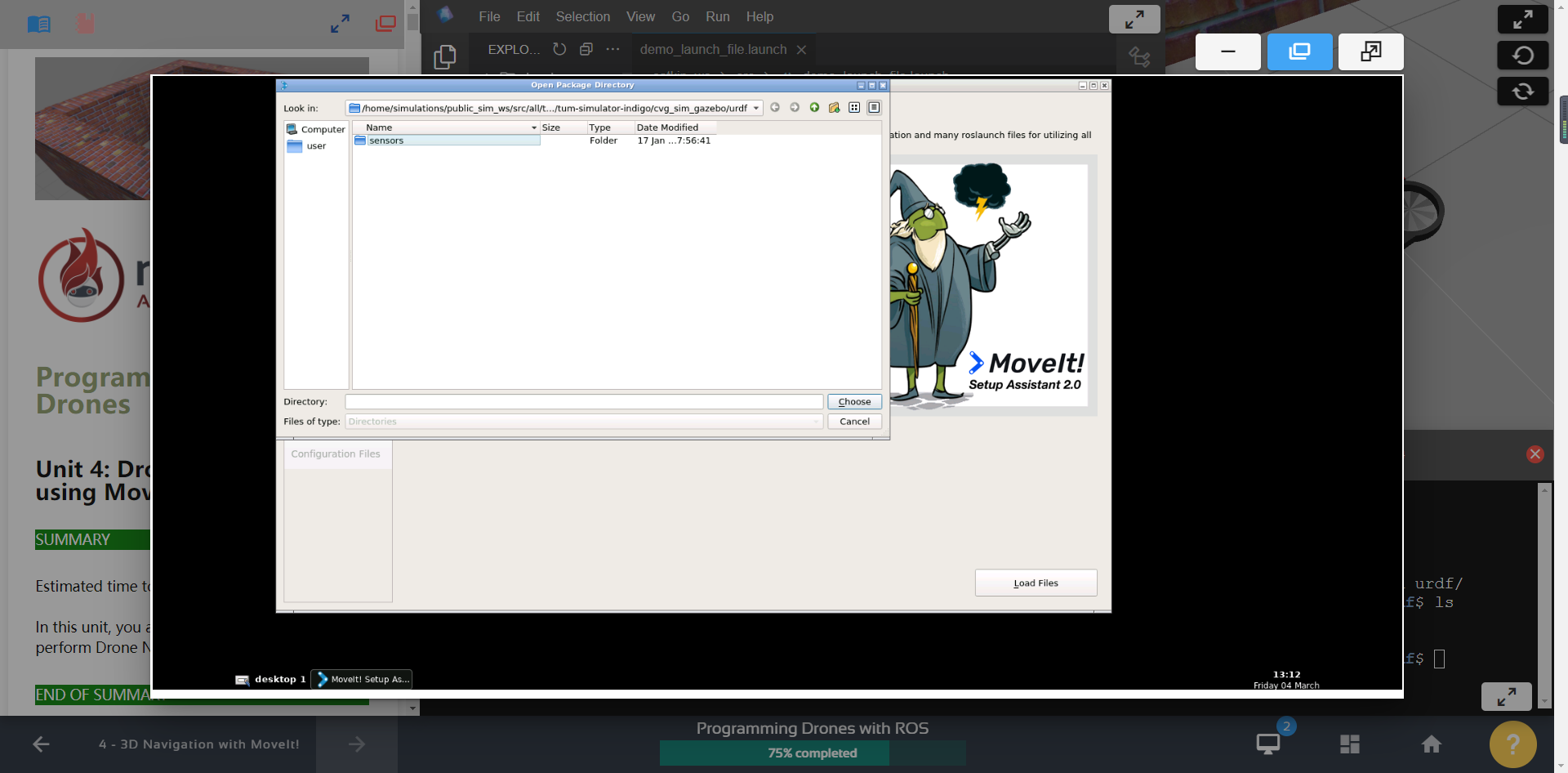
If you click to create a new configuration, you can select a file.
But if you want to edit an existing configuration, then you need to select the folder created by moveit previously.
Do you have a configuration created or this is the first time in the exercise?
Oh, thank you, it work!
1 Like