Hi,
I am doing the rosject of ROS Navigation in 5 days. But I come with some problems. When I do the third part, a.k.a the path planning part, it says to create many yaml-file to offer parameters for move_base package. Here come the problems:
1.
In the course book, it points out especially that when we set parameters for global costmap, in noetic distribution, frames should be set without ‘/’, for example:
global_frame: /map # NOT VALID IN NOETIC
global_frame: map # VALID IN NOETIC
but when I copy the original code into rosject workspace, it goes error as:
[WARN] : global_costmap: Parameter "plugins" not provided, loading pre-Hydro parameters
[WARN] : local_costmap: Parameter "plugins" not provided, loading pre-Hydro parameters
but when I add ‘/’ ahead of ‘map’(for global map) and ‘odom’(for local map), it goes correctly:
[ INFO] [1668011233.297911972, 700.454000000]: global_costmap: Using plugin "inflation_layer"
[ INFO] [1668011234.284148657, 700.873000000]: local_costmap: Using plugin "obstacle_layer"
[ INFO] [1668011234.284148657, 700.873000000]: local_costmap: Using plugin "obstacle_layer"
[ INFO] [1668011234.650939230, 701.014000000]: local_costmap: Using plugin "inflation_layer"
so what actually should we do? add the ‘/’ or not?
Even though the loginfo is telling that the plugins are correctly used, I still cannot get a valid costmap in Rviz.
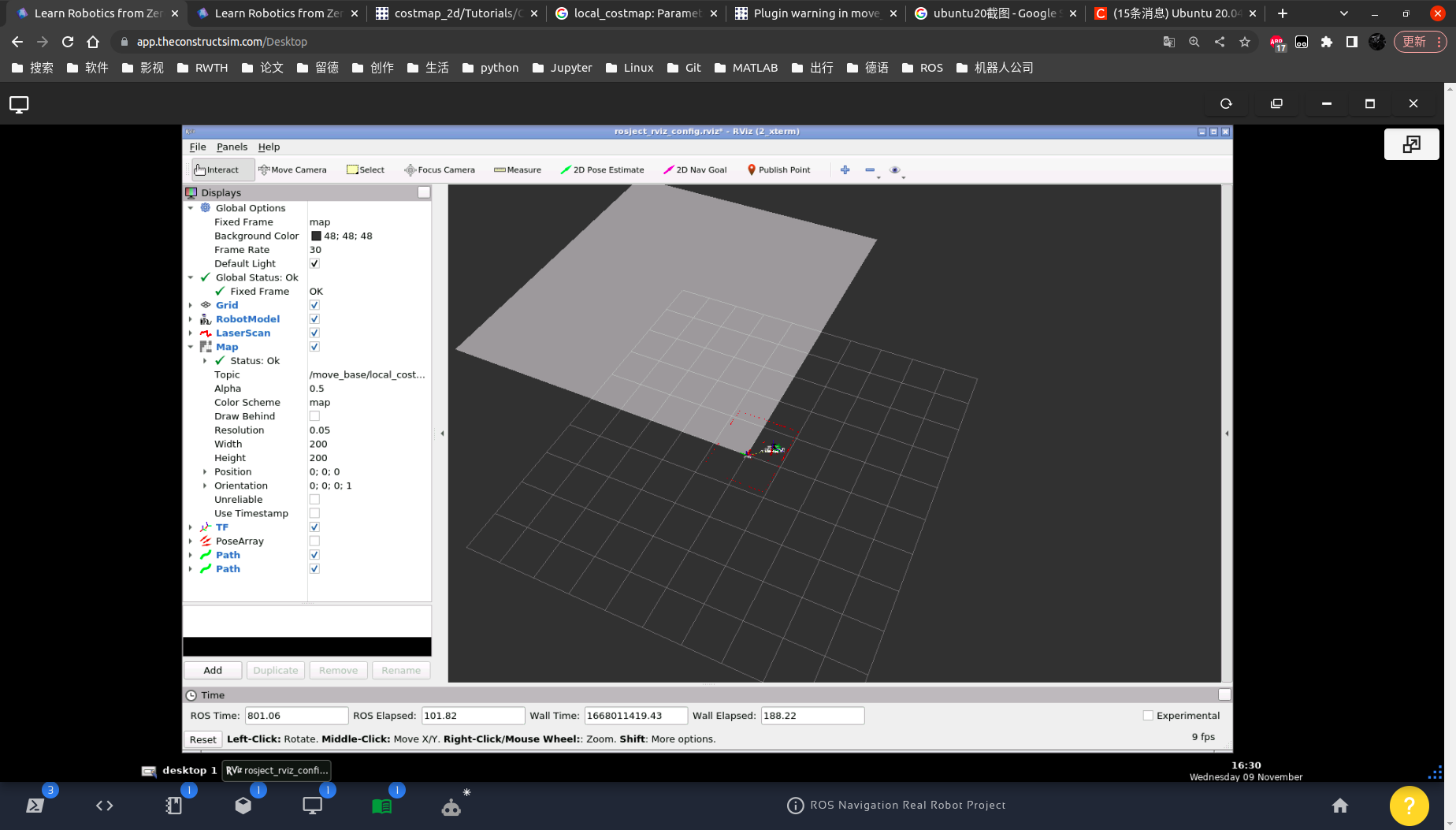
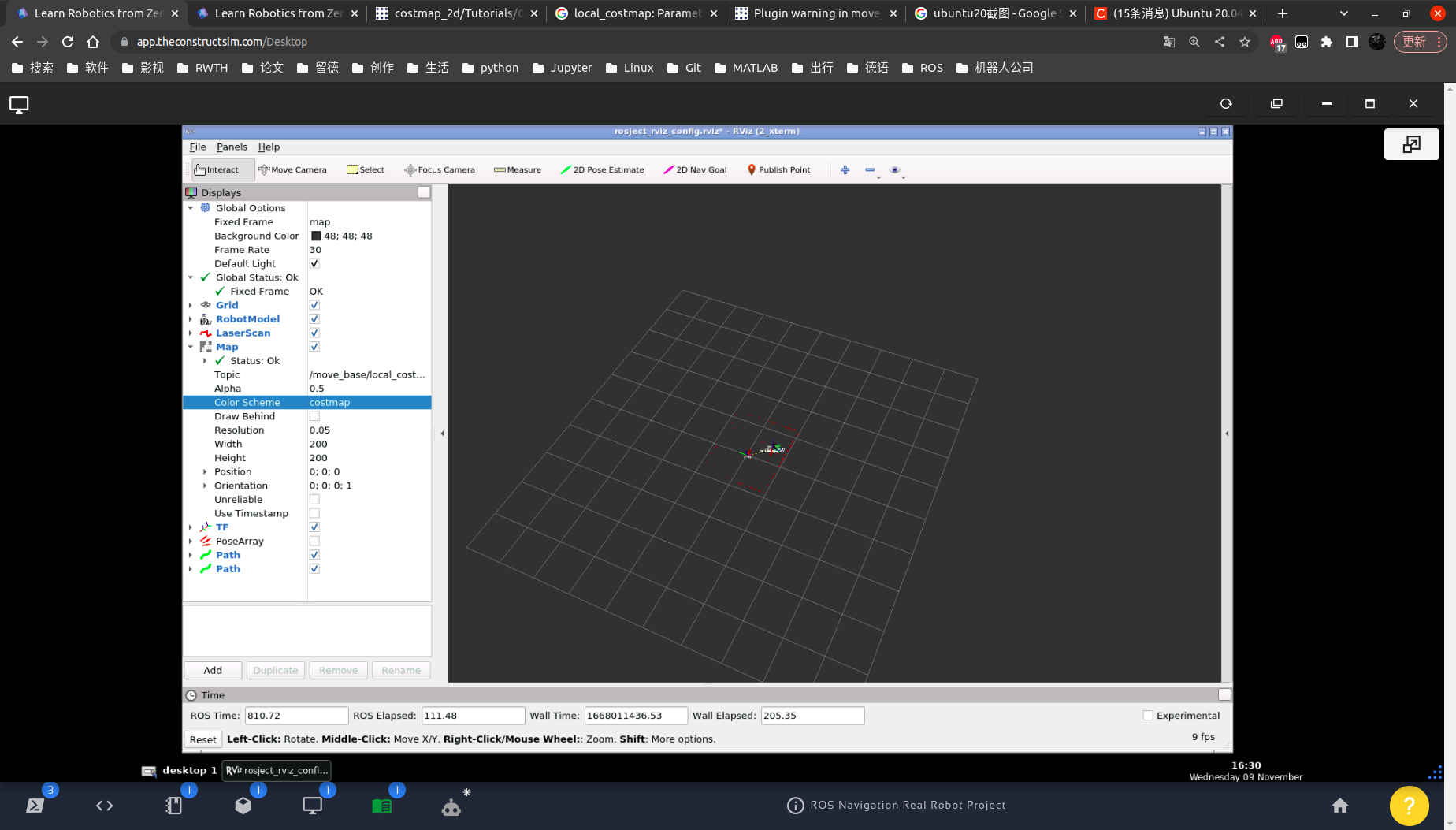
when I choose the topic as ‘/move_base/local_costmap/costmap’,
this is ‘local costmap’ in color scheme of ‘map’
this is ‘local costmap’ in color scheme of ‘costmap’
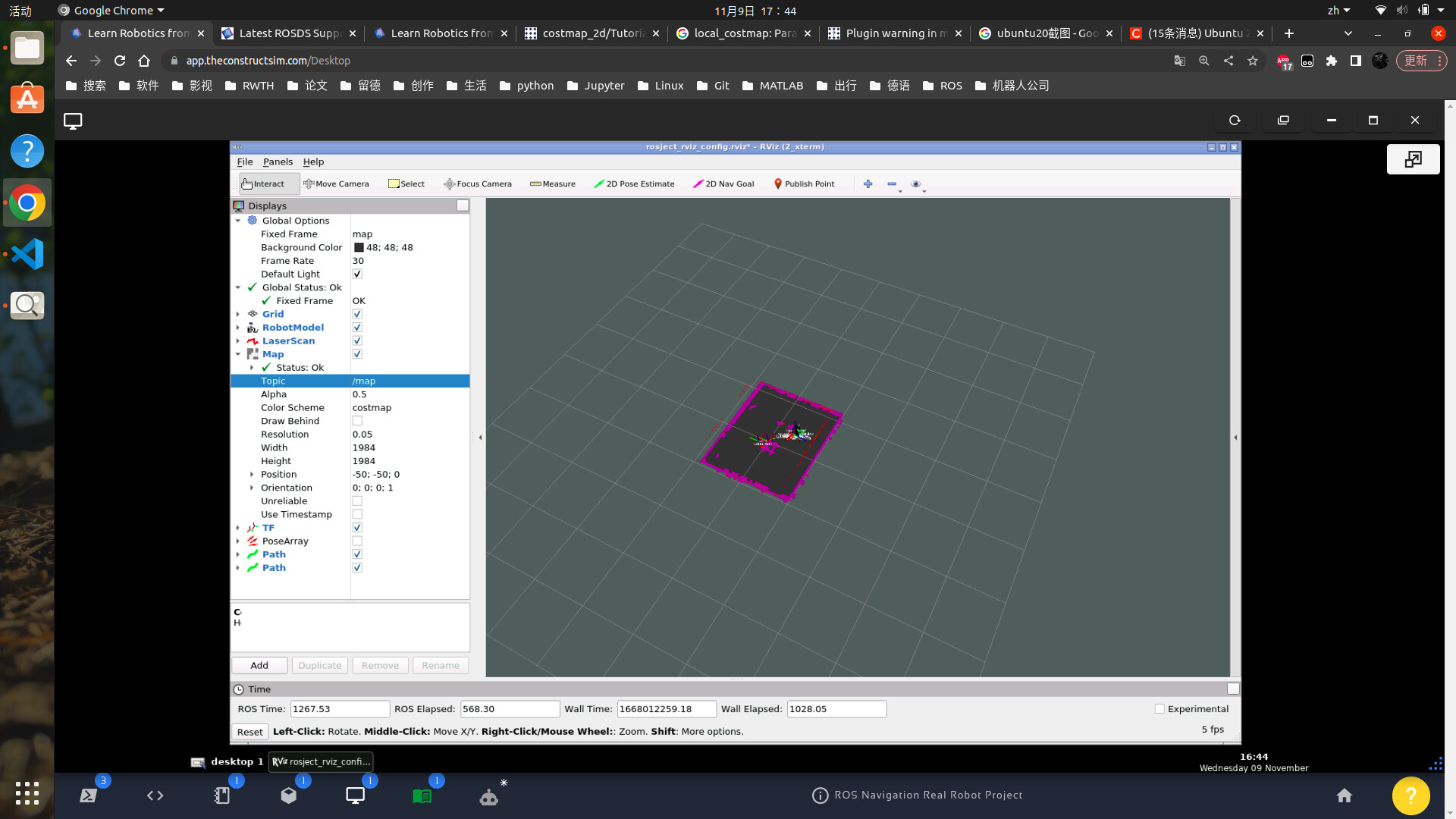
but when I choose the topic as ‘/map’, it is correct:
I have correctly done the steps before this part, including providing map and amcl launching, but still cannot send goals with ‘2d Nav Goal’ tool. When I use it to give a goal, nothing happens.
the terminal shows this message:
[ WARN] [1668015443.600002824, 3163.874000000]: The robot's start positionis off the global costmap. Planning will always fail, are you sure the robot has been properly localized?
This seems strange, because I just set the goal inside the map and beside the turtlebot.
All the parameters for configuration of ‘move_node’ are copied from course book.
I doubt that this map provided in this rosject is too small, but the scale of turtlebot and the map are both unknown. I am not sure if this is the resaon for the problem.