I created moveit package for fetch.
1st issue: there is no launch file fetch_planning_execution.launch
I therefore use the move_goup.launch file. is this correct?
2. When I start the planning_script.py file I get the followung errors:
user:~$ rosrun my_motion_scripts joint_planning.py
the rosdep view is empty: call ‘sudo rosdep init’ and ‘rosdep update’
Failed to import pyassimp, see https://github.com/ros-planning/moveit/issues/86 for more info
[ INFO] [1590141400.262686327, 241.844000000]: Loading robot model ‘fetch’…
[ INFO] [1590141400.263462253, 241.844000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
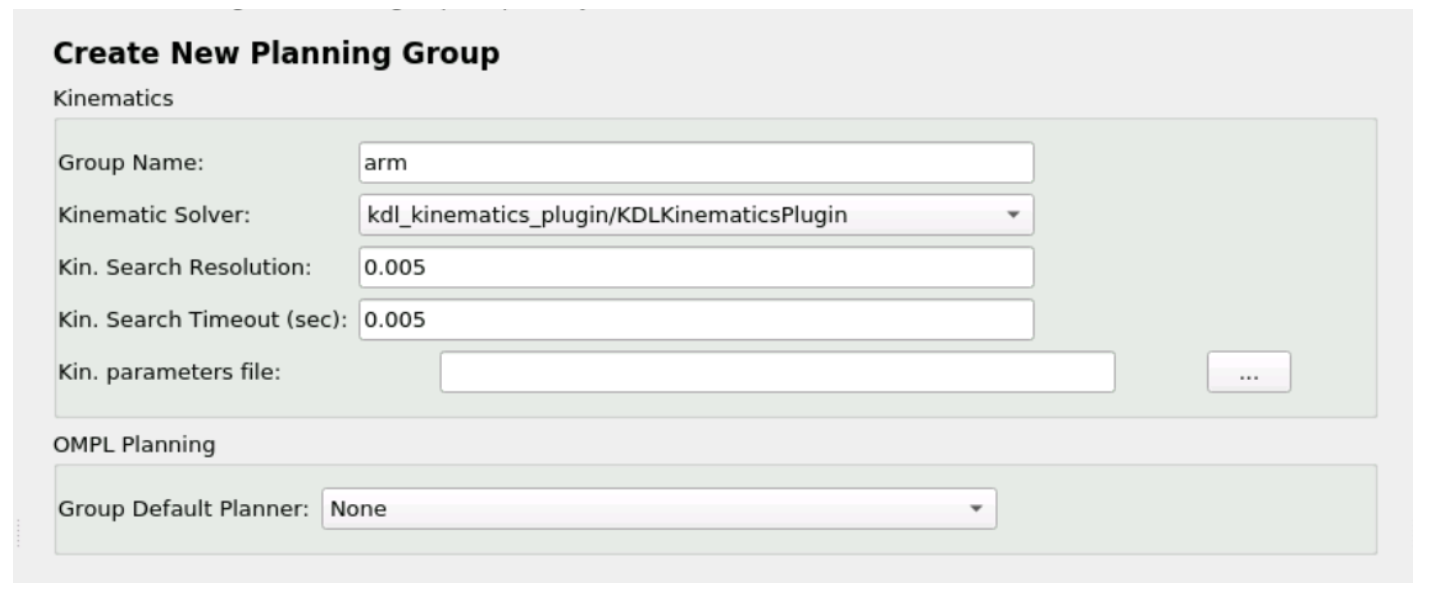
[ WARN] [1590141401.378578762, 242.328000000]: No kinematics plugins defined. Fill and load kinematics.yaml!
[ INFO] [1590141402.577801762, 243.261000000]: Ready to take commands for planning group arm.
[ WARN] [1590141403.039565903, 243.476000000]: Fail: ABORTED: No motion plan found. No execution attempted.
user:~$
The fetch_planning_execution.launch file has to be created by you, as explained in previous Units. If you still don’t know how to create it, you can have a look at the ROSject provided in the Solution for the Exercise 3.1.
Hi there,
I have a similar issue. Even though I created the fetch_planning_execution.launch file and I can successfully launch it and use it with the MoveIt Rviz GUI, I am not able to execute the script successfully as I receive the following message:
user:~/catkin_ws/src$ python motion_planning_program.py
[ INFO] [1607792192.175976184, 1722.872000000]: Loading robot model 'fetch'...
[ INFO] [1607792192.176050934, 1722.872000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1607792192.823737788, 1723.204000000]: Loading robot model 'fetch'...
[ INFO] [1607792192.823813745, 1723.204000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ WARN] [1607792192.896831005, 1723.238000000]: The root link base_link has an inertia specified in the URDF, but KDL does not supp
ort a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.[ INFO] [1607792194.285977416, 1723.911000000]: Ready to take commands for planning group arm.
[ WARN] [1607792199.321741213, 1727.222000000]: Fail: ABORTED: No motion plan found. No execution attempted.
In the terminal where I launched the fetch_planning_execution.launch I receive the following messages:
[ INFO] [1607792194.301524963, 1723.927000000]: Planner configuration 'arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed.
[ INFO] [1607792194.302489811, 1723.928000000]: RRTConnect: Starting planning with 1 states already in datastructure
[ WARN] [1607792198.578911352, 1726.773000000]: MessageFilter [target=/base_link ]: Dropped 100.00% of messages so far. Please turn the [ros.moveit_ros_perception.message_notifier] rosconsole logger to DEBUG for more information.
[ERROR] [1607792199.310151143, 1727.214000000]: RRTConnect: Unable to sample any valid states for goal tree
[ INFO] [1607792199.310254951, 1727.215000000]: RRTConnect: Created 1 states (1 start + 0 goal)
[ INFO] [1607792199.310311265, 1727.215000000]: No solution found after 5.008106 seconds
[ INFO] [1607792199.320275917, 1727.219000000]: Unable to solve the planning problem
[ WARN] [1607792202.165238013, 1728.844000000]: MessageFilter [target=base_link ]: Dropped 100.00% of messages so far. Please turn the [ros.rviz.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1607792292.366806086, 1786.774000000]: MessageFilter [target=/base_link ]: Dropped 100.00% of messages so far. Please turn the [ros.moveit_ros_perception.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1607792295.591065431, 1788.907000000]: MessageFilter [target=base_link ]: Dropped 100.00% of messages so far. Please turn the [ros.rviz.message_notifier] rosconsole logger to DEBUG for more information.
Could you please send me your Moveit package and motion planning scripts that are failing to aezquerro@theconstructsim.com? This way I’ll be able to test them and try to figure out what’s wrong.
I think this error might be caused because of this: No kinematics plugins defined. Fill and load kinematics.yaml!.
Did you set a kinematics solver when defining your planning group? You might have to edit your Moveit package with the Setup Assistant in order to set this properly.