jacks
May 4, 2020, 4:43am
1
On 2-ROSBasics
Shouldn’t the user stop the running code with Ctrl-C after example 1.7 is complete?
Example 1.7
Type this command in a new shell and look for the node you’ve just initiated (ObiWan).
Execute in WebShell #1
rosnode list
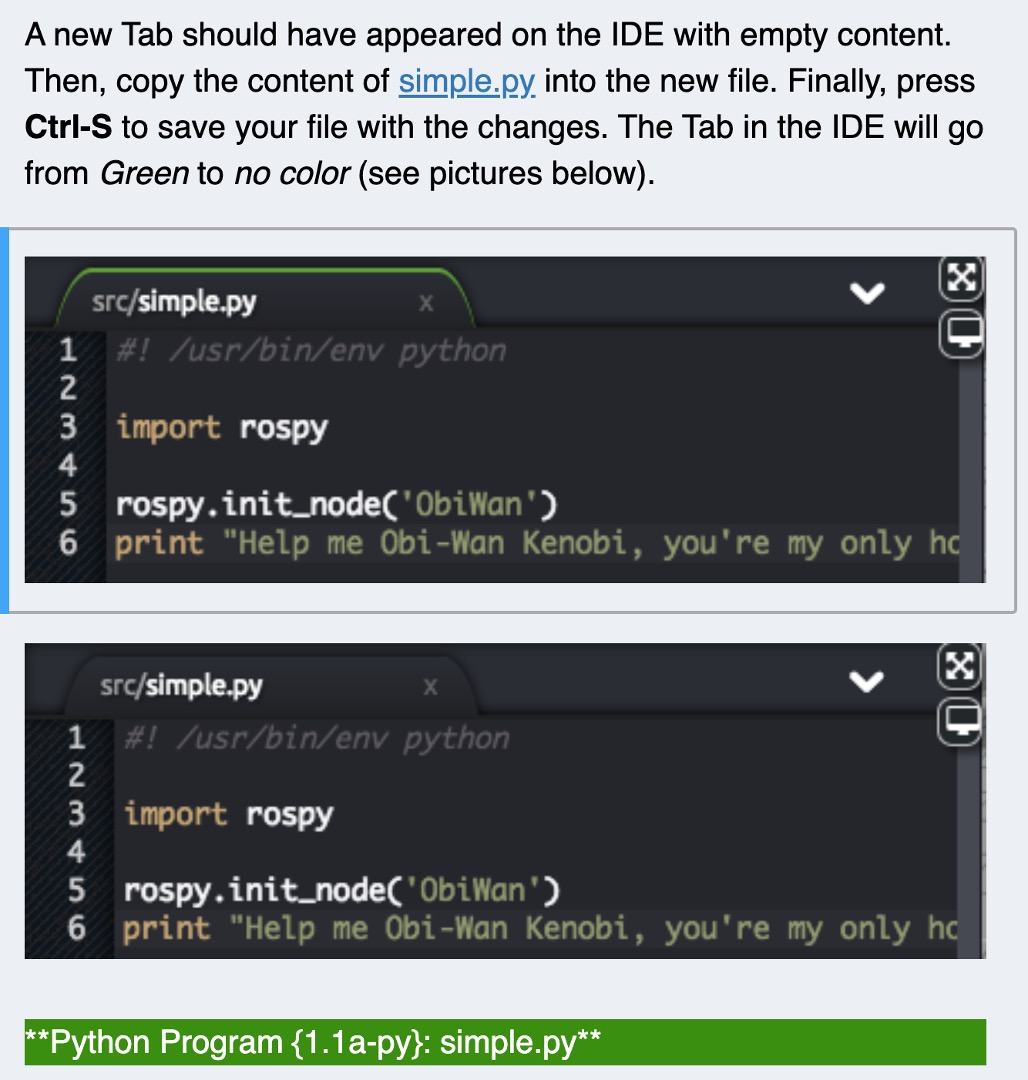
Update your Python file simple.py with the following code:
jacks
May 4, 2020, 2:59am
2
On 2 - ROS Basics
Thanks,
-Jack
jacks
May 3, 2020, 1:28am
3
Quick question / suggestion.
i.e.,
Example 1.1
Example 1.2
Example 1.3
Example 1.4
Then on
Example 1.1
Example 1.2
Example 1.3
Example 1.4
Shouldn’t the examples on 2-ROSBasics be 2.1, 2.2, 2.3, 2.x …
Thanks,
jacks
May 2, 2020, 9:55pm
4
On Example 1.1,
Would the command to stop the robot be
roslaunch publisher_example stop.launch
It is currently showing as
roslaunch publisher_example move.launch
Whenever you want to stop moving the robot, and in order to stop the program, just press Ctrl + C in the WebShell.
NOTE: You will notice that, even after stopping the program, the robot will still keep moving. In order to stop it, you will have to execute another command.
Now select WebShell #2 and execute the following command in order to stop the Kobuki robot.
Execute in WebShell #2
In
roslaunch publisher_example move.launch
Hi @jacks !
Thanks so much for pointing out the bug and suggesting the improvements. We love hearing from our clients and we appreciate the feedback so much.
We will look into this and let you know. Thanks again!
By the way, welcome to the Community!