Hello! I am taking your “ROS in 5 Days” lesson now. I am working on Unit 11, where we have to make a Sphero finish the maze. Although I’m done with my programming parts, I don’t seem to be able execute it. All of them are from the website, except for a few of my launch files. It produces this error message as well (please have a look at my picture). I think I have some issues with my file names or my directories.
Have I missed out anything in each directory? Or maybe I should rename some?
Please help me debug them…
Thank you :)!
Hi,
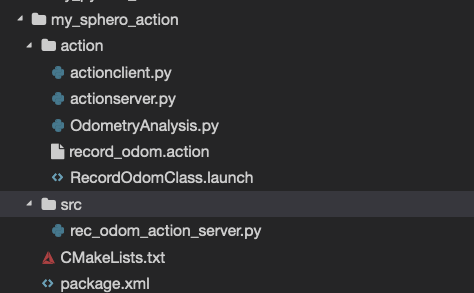
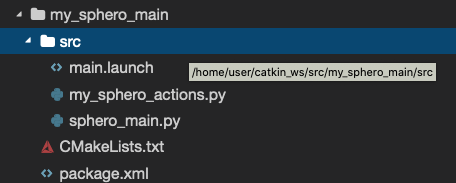
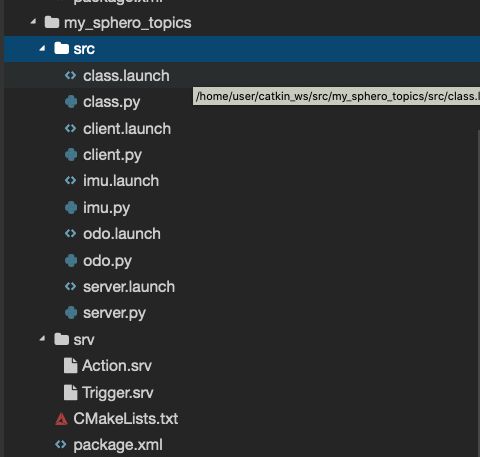
One thing I can see right away is, that your launch files are not in a launch directory. Try to fix that first and try again.
Thank your for your reply!!! I fixed it but still did not run…
Would you mind showing me the screenshots of the inside of your directories because I think some of my program files have wrong names and/or not in the right directories? 
My structure is very different from the provided solution, as I did it completely myself. I can only encourage you to really try and do it yourself too, as that is how you learn programming the best. The notebook gives good guidance and suggestions what to do and work on. I have pasted the overview below. Remember that it purpose is to learn ROS, not to get a score and move on. Try to do all the steps. If you are stuck on a part or have specific questions, feel free to ask for help. It is also a good idea to look at your code from the earlier lessons, where you learned all about subscribers, services and actions. In the case that you do run into an error you cannot solve yourself, please paste the error message and as much relevant information as possible 
Ideas to Start Working On
This is a list of things that you can start with. You do not have to follow them. They are provided just in case you don’t know where to start.
- Start watching some of the messages the sensor topics are publishing. Try to get an idea about the information that they are providing. Move the robot in the simulation and see how those messages change their values. It is very important that you understand how changes in the robot produce changes in the topics.
- Try to move the robot by sending messages to the /cmd_vel (either through the console or through python programs).
- Observe how the topic messages change when the robot hits an obstacle.
- Is the odometry trustworthy? Can you move the robot the exact amount, even when it collides with something?
Steps You Should Cover
These are the steps that you should follow throughout the duration of the project. These steps will ensure that you have practised and created all of the structures that will be asked about in the final exam of this course. If you perform all of the steps mentioned here, you will find completion of the exam to be achievable.
- Step 1: Read and Write Topics (Dedicate 2 hours)
- Step 2: Use topics through Services (Dedicate 3 hours)
- Step 3: Use topics through Actions (Dedicate 4 hours)
- Step 4: Create a main program to manage everything (Dedicate 1 hour)
- EXTRA Step: How to use python modules from different packages (Not required, included here for information purposes only)
1 Like