Hi @staff
I am simulating an evasive maneuver in Autoware.AI (ROS1 based) with SVL simulator.
For some reason the pedestrian is not avoided by the car. I am not sure where the problem is. If is on:
1 - Detect the pedestrian ?
2 - “Spawn” the pedestrian on rviz map ?
3 - Motion planner algorithm ?
4 - Sensor Issue caused by SVL simulator side to detect the pedestrian ?
I have recorded short videos of the car colliding with this agent. They are available in youtube:


As you can check the camera in rviz received the data. (The laser scan I am not sure, because the pedestrian does not appear to Point Cloud, right?)
Besides that I put a bigger agent, a car, to figure out if rviz detects it. For my surprise it detected, and the car’s shape is drawed in pink. However there is an issue with the map in perception module:
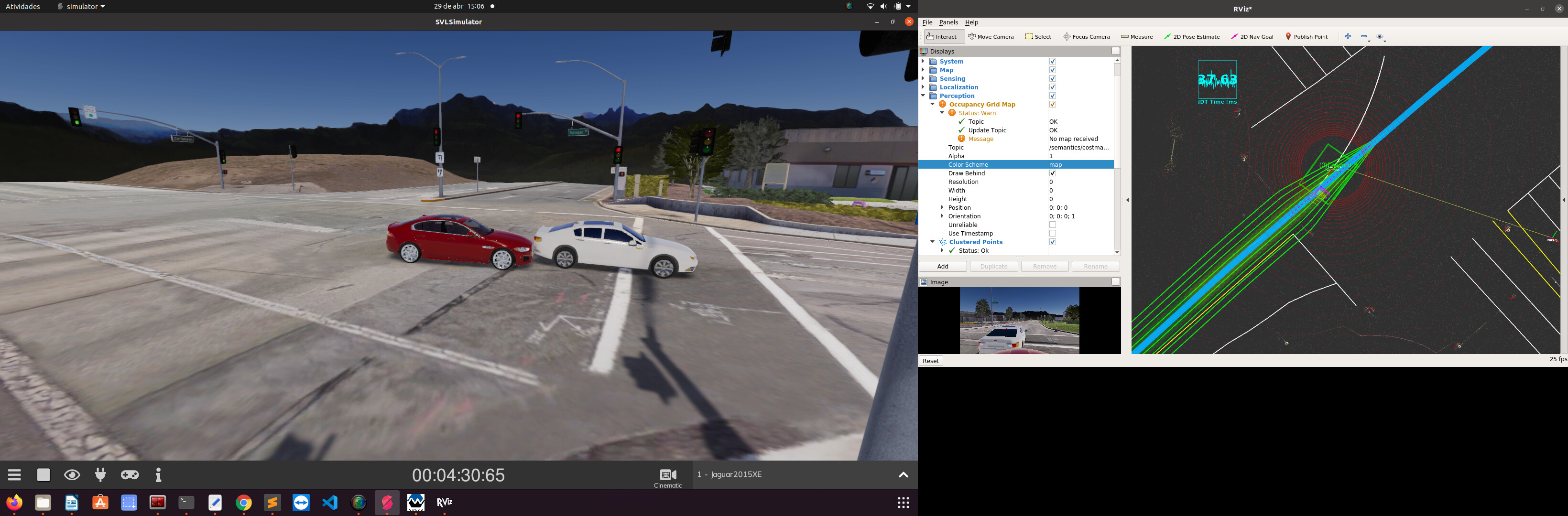
it says occupancy grid map warning: "no map received"
From the nav course I am aware that the previous map is required, in this case, the map of BorregasAve city was dowloaded. And I know that the sensors should update the map with new info about obstacles that appear over the old map….then I did not find out why this map is not updated. Some hint?
I believe I am facing an issue similar as this one, that I answered: costmap_generator work,but it topic /semantics/costmap_generator/occupancy_grid do not have data!!! - ROS Answers: Open Source Q&A Forum
However I don’t know if this is the problem and how/which package to use to fix.
I am trying to debug what is going on. But if someone of you had a similar issue previously and could me give advices to figure out this more quickly, I will be very grateful!
I still did not do the perception course in RIA.
Thanks