vkuehn
February 1, 2023, 7:46pm
1
Hello,
in lection 4.4.1 is a code example for the move_laser.py with
from control_msgs.action import FollowJointTrajectory
but that is not found. I found somewhere other examples for FollowJointTrajectory but they did fail also.
As this is an old course, did anyone also have that issue ?
Regards,
Hello @vkuehn ,
I am investigating the issue and was not able to reproduce your error.
From your terminal, could you please run this command here:
ros2 interface list | grep control_msgs/action
You should see the interface in the list, like so:
control_msgs/action/FollowJointTrajectory
control_msgs/action/GripperCommand
control_msgs/action/JointTrajectory
control_msgs/action/PointHead
control_msgs/action/SingleJointPosition
You can also open a Python Interpreter and see if the import works without error messages.
python3
then inside the python interpreter run:
from control_msgs.action import FollowJointTrajectory
I did that and it did not show any errors. Like this:
Could you please post here your results?
Thanks,
Roberto
vkuehn
February 3, 2023, 7:25am
3
Hello @rzegers ,
to reproduce the error I wanted to start everything again but failed when
ros2 launch my_box_bot_gazebo spawn_robot_ros2_control_velocity.launch.xml
with
file 'spawn_robot_ros2_control_velocity.launch.xml' was not found in the share directory of package 'my_box_bot_gazebo' which is at '/home/user/ros2_ws/install/my_box_bot_gazebo/share/my_box_bot_gazebo'
the file exists in
/home/user/ros2_ws/src/my_box_bot_gazebo/launch/spawn_robot_ros2_control_complete.launch.xm
and build runs through.
interface list looks like this.
control_msgs/action/FollowJointTrajectory
control_msgs/action/GripperCommand
control_msgs/action/JointTrajectory
control_msgs/action/PointHead
control_msgs/action/SingleJointPosition
the import on comand line works fine.
Any hint ?
Regards,
Hello Volker,
if you can list the action interface and also import the module using the Python interpreter then we can safely confirm that the package is properly installed. so we can rule out that the package is missing.
Now to the launch file issue:
The fact that the launch file is located inside here the workspace src directory :
~/ros2_ws/src/my_box_bot_gazebo/launch
but not inside the install directory :
~/ros2_ws/install/my_box_bot_gazebo/share/my_box_bot_gazebo
Is an indication that:
1.- Maybe the install statement is missing in your CMakeLists.txt file, so please check that you have this part here inside it:
install(
DIRECTORY
launch
worlds
models
DESTINATION
share/${PROJECT_NAME}/
)
2.- Or maybe you are not sourcing your workspace’s install directory after the build, so please make sure your run
source ~/ros2_ws/install/setup.bash
after you build your package.
EDIT: I just noticed that you have two different launch file names:
1.- The one in your ros2 launch command is:spawn_robot_ros2_control_velocity.launch.xml
2.- The one on your package’s launch directory is this one:spawn_robot_ros2_control_complete.launch.xml
So as an additional check please also confirm that the launch file you want to run (spawn_robot_ros2_control_velocity.launch.xml) exists in your package’s launch directory inside yoursrc directory : ~/ros2_ws/src/my_box_bot_gazebo/launch
Let’s see if this allows you to run that launch file.
Cheers,
Roberto
vkuehn
February 4, 2023, 6:02pm
5
@rzegers
good spot about the cmake file. As the description and gazebo parts are different projects, the cmake files look like
my_box_bot_description/CMakeLists.txt
install(
DIRECTORY
urdf
rviz
launch
meshes
config
DESTINATION
share/${PROJECT_NAME}/
)
my_box_bot_gazebo/CMakeLists.txt
install(
DIRECTORY
launch
worlds
models
DESTINATION
share/${PROJECT_NAME}/
)
install(PROGRAMS
scripts/move_laser.py
DESTINATION lib/${PROJECT_NAME}
)
which one do you mean ?
Also I finished lection 4 until the end as it looks like there has been simply missing the launch files.
The rotation commands work fine. Still
ros2 run my_box_bot_gazebo move_laser.py 0.0
Traceback (most recent call last):
File "/home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py", line 8, in <module>
from control_msgs.msg import FollowJointTrajectory
ImportError: cannot import name 'FollowJointTrajectory' from 'control_msgs.msg' (/opt/ros/galactic/lib/python3.8/site-packages/control_msgs/msg/__init__.py)
Which CMAke File should contain what ?
Regards
Hello @vkuehn ,
I think it is confusing because we are discussing two different issues in one thread:
Your issue with the launch file file that you reported on your second message posted here.
Your original issue with the import ImportError: cannot import name 'FollowJointTrajectory' from 'control_msgs.msg'
So just for clarifying : From this sentence it seems to me that you have solved the issue with the launch file that was missing.
Let us focus now on the issue with the import error message that you see.
In your first message you posted that this instruction is giving an error:
from control_msgs.action import FollowJointTrajectory
and now in your last message you have posted an error message like this:
from control_msgs.msg import FollowJointTrajectory
these two a different statements, can you see the difference?
The first one is correct. Please make sure that your file move_laser.py uses the correct import statement which is shown in the course.
Looking forward if this solves the issue,
Roberto
vkuehn
February 6, 2023, 7:17pm
7
@rzegers
that’s right, not sure where the wrong example came from. Maybe some google result
./my_box_bot_gazebo/scripts/move_laser.py
from control_msgs.action import FollowJointTrajectory
still is not found
Unfortunately not solved yet
V
Hello @vkuehn , sad to hear that the import statement is still not working even after confirming that it works using the Python Interpreter and that the import line in your code is now correct.
To continue debugging the issue may I ask you to provide an overview in terms of the files that you have inside ros2_ws/src?
Just execute these two commands and paste the output here in the forum using code blocks:
cd ~/ros2_ws/src
find . | sed -e "s/[^-][^\/]*\// |/g" -e "s/|\([^ ]\)/|-\1/"
Please paste the complete output here, It might be several lines! Use the icon to maximize the webShells window if necessary for easier copy-pasting the long output.
Then I need your complete version of the move_laser.py file. It it really important that you copy and paste the full file that you have here:
~/ros2_ws/src/my_box_bot_gazebo/scripts/move_laser.py
Copy paste the entire file here, please use code blocks for formatting, please double check that you are copying the correct file!
Next I need you to copy and paste the contents of this CMakeLists.txt file here:~/ros2_ws/src/my_box_bot_gazebo/CMakeLists.txt
Finally I need the complete error message that you get when you execute:ros2 run my_box_bot_gazebo move_laser.py 0.0copy and paste the entire error message , please don’t leave any part out. Too much information is better than too little. Please remember to post as a code block for better readability.
Based on what I can find in the information that you provide we will determine the most useful next course of action.
Regards,
Roberto
vkuehn
February 7, 2023, 7:07pm
9
@rzegers ,
to ease the investigation I would have added the whole src as tar or share the course as rosject, but that is not allowed
Files in src are
.
|-my_robot_model
| |-package.xml
| |-worlds
| | |-box_bot_empty.world
| |-launch
| | |-urdf_visualize_meshes.launch.py
| | |-spawn_robot_ros2.launch.xml
| | |-spawn_robot_ros2_control.launch.xml
| | |-urdf_visualize_meshes_collisions_inertias.launch.py
| | |-urdf_visualize.launch.py
| | |-spawn_robot_description.launch.py
| | |-urdf_visualize_geometric.launch.py
| | |-start_world.launch.py
| | |-urdf_visualize_control.launch.py
| |-.gitignore
| |-urdf
| | |-box_bot_physcal_control.urdf
| | |-box_bot_meshes_collisions_inertias.urdf
| | |-box_bot_geometric_meshes.urdf
| | |-box_bot_geometric.urdf
| | |-box_bot_simple.urdf
| | |-box_bot.xacro
| |-.gitattributes
| |-README.md
| |-meshes
| | |-cute_cube.dae
| | |-sensors
| | | |-realsense.dae
| | | |-rplidar.dae
| | | |-rplidartexture.png
| | |-lambert3_baseColor.png
| | |-cute_cube.blend
| | |-textures
| | | |-lambert3_baseColor.png
| |-rviz
| | |-urdf_vis.rviz
| |-.git
| | |-objects
| | | |-f4
| | | | |-7e96a06b7c53ff646c75a59220fd305668cb06
| | | |-17
| | | | |-5e9866b5e31ef38b46d1d66a38ba2af01656e3
| | | |-e6
| | | | |-9de29bb2d1d6434b8b29ae775ad8c2e48c5391
| | | |-96
| | | | |-5ebffcb8946808459f2fbdca05650c50e7f9f1
| | | |-a3
| | | | |-6c3ea85051a1b05438ab2d414a56c2ba199f36
| | | |-41
| | | | |-857dea7c87fe904937d858e5644c00482337fb
| | | |-1a
| | | | |-220c54f5306edd20348aec7b4f2727d0b4e758
| | | |-25
| | | | |-d8512251aa446ddeeb79e736f16ece2d34f3bf
| | | |-dc
| | | | |-ae4731ecc9a93f0b2224b276afd39b0f32eedb
| | | |-4a
| | | | |-1dc6139a268ae0fd30b71046804eda6e7fe43b
| | | |-42
| | | | |-b3cb026c74e288eea3bfea67485829c9dbdc21
| | | |-e2
| | | | |-5a41f5d27259b0f818b6b466983e9c9f362d02
| | | |-df
| | | | |-803988c8d66ce49608c305b7c197e4ce0827d6
| | | |-c2
| | | | |-fa1206e1c9e8f6dbc56d65cab97b7674b459fb
| | | |-45
| | | | |-14db8c00b13e108c028d31941967e938f930e5
| | | | |-e45cb2ac254be8d18b307932e72b16e3232da6
| | | |-4e
| | | | |-accd63b1ff7a5a7832a870996de73bc8f310b6
| | | |-af
| | | | |-717cef9414e3bf40cec9b2b46f0ae55cef53a5
| | | | |-20296fbcc14d0399f6f5c200733892736565b9
| | | |-88
| | | | |-b2c8638fc7cdd23edf885f4c97a451d3550f82
| | | |-b0
| | | | |-63650e34f3a39d5acde48a4ac33241cb2a43a4
| | | |-pack
| | | |-53
| | | | |-10d27cdd1dcf6ef3ac51649a3ca5a391a6a7d7
| | | | |-bd63e15ab51b7024a1bba20eb5489647f53219
| | | |-a6
| | | | |-968395394d8a3a5dc05960437703ed5323fa50
| | | |-07
| | | | |-3dab5927ddf86fc86a9a891f179ee1aa2ca334
| | | |-7a
| | | | |-247cd316bd0332f4c1651548a1f158b821e287
| | | | |-b838f2a994f745207865f3d384fff959a2a7a1
| | | |-bd
| | | | |-4a4576eceb22741c892684065cd433755d15ad
| | | |-80
| | | | |-35fa1eed62a7bddda488f16bcece6e75627400
| | | |-c4
| | | | |-6965865af6ca6de83ce65c4abb8a710b432ff8
| | | |-0d
| | | | |-5c9a5a8d05307a3acb83e23f1ef427eb3321f3
| | | |-ff
| | | | |-df27c8c67866d0ab180500a67a532e7c7a9dbb
| | | |-2b
| | | | |-a0a1059923f74e5cfb8683484c313423c02a2a
| | | |-9a
| | | | |-1dc8a21ed2059310336334fe1664c81ebbe639
| | | |-3a
| | | | |-176ca12e5d8e92e3022824af336c0b88987ad6
| | | |-7e
| | | | |-8d93264541493872ef2618bc1ec125a993d6ab
| | | |-02
| | | | |-3fd870195eabb4740686ff14a8f3a7dc402cfb
| | | |-a5
| | | | |-b42b80308340c7d85a99bd00ca7f27c837cd69
| | | |-f5
| | | | |-e94fae233c3aace9500294b68ccc5b34446444
| | | |-info
| | | |-c3
| | | | |-b07dd88f42ab378369cbc5152694aa3b6e84f1
| | | |-d3
| | | | |-947053223194e0d461073b35d494cf4acbf2bb
| | | |-6a
| | | | |-33af9cdfc7a2fc335554d6b5f89987d52f8305
| | | |-c6
| | | | |-3f2ce42d9117692e704f7467530d7f3b8402a9
| | | |-cb
| | | | |-5960a07c564b8c9c5961506f728c774fe0611b
| | | | |-d5aaa25e7dc7469eba0ad37b1662b8995a80f7
| | |-refs
| | | |-tags
| | | |-heads
| | | | |-master
| | | |-remotes
| | | | |-origin
| | | | | |-HEAD
| | |-hooks
| | | |-update.sample
| | | |-commit-msg.sample
| | | |-prepare-commit-msg.sample
| | | |-pre-rebase.sample
| | | |-pre-merge-commit.sample
| | | |-pre-applypatch.sample
| | | |-applypatch-msg.sample
| | | |-fsmonitor-watchman.sample
| | | |-pre-commit.sample
| | | |-pre-push.sample
| | | |-post-update.sample
| | | |-pre-receive.sample
| | |-config
| | |-description
| | |-branches
| | |-HEAD
| | |-packed-refs
| | |-logs
| | | |-refs
| | | | |-heads
| | | | | |-master
| | | | |-remotes
| | | | | |-origin
| | | | | | |-HEAD
| | | |-HEAD
| | |-index
| | |-info
| | | |-exclude
| |-CMakeLists.txt
| |-models
| | |-box_room
| | | |-model.sdf
| | | |-meshes
| | | | |-box_room.dae
| | | | |-chambre.png
| | | |-model.config
|-my_box_bot_description
| |-package.xml
| |-launch
| | |-urdf_visualize_meshes.launch.py
| | |-urdf_visualize_rviz_ex_1-1.launch.py
| | |-urdf_visualize_control_complete.launch.py
| | |-urdf_visualize_control_velocity.launch.py
| | |-urdf_visualize_meshes_collisions_inertias.launch.py
| | |-urdf_visualize.launch.py
| | |-urdf_visualize_physical.launch.py
| | |-urdf_visualize_geometric.launch.py
| | |-urdf_visualize_rviz.launch.py
| | |-urdf_visualize_control.launch.py
| |-build
| | |-.built_by
| | |-my_box_bot_description
| | | |-ament_xmllint
| | | |-ament_cpplint
| | | |-ament_cmake_package_templates
| | | | |-templates.cmake
| | | |-ament_cmake_core
| | | | |-stamps
| | | | | |-nameConfig-version.cmake.in.stamp
| | | | | |-package.xml.stamp
| | | | | |-package_xml_2_cmake.py.stamp
| | | | | |-ament_prefix_path.sh.stamp
| | | | | |-path.sh.stamp
| | | | | |-nameConfig.cmake.in.stamp
| | | | | |-templates_2_cmake.py.stamp
| | | | |-my_box_bot_descriptionConfig.cmake
| | | | |-package.cmake
| | | | |-my_box_bot_descriptionConfig-version.cmake
| | | |-cmake_install.cmake
| | | |-ament_cmake_environment_hooks
| | | | |-local_setup.zsh
| | | | |-path.dsv
| | | | |-local_setup.dsv
| | | | |-ament_prefix_path.dsv
| | | | |-package.dsv
| | | | |-local_setup.sh
| | | | |-local_setup.bash
| | | |-CTestTestfile.cmake
| | | |-ament_flake8
| | | |-install_manifest.txt
| | | |-CMakeFiles
| | | | |-3.16.3
| | | | | |-CMakeCXXCompiler.cmake
| | | | | |-CompilerIdC
| | | | | | |-a.out
| | | | | | |-tmp
| | | | | | |-CMakeCCompilerId.c
| | | | | |-CompilerIdCXX
| | | | | | |-CMakeCXXCompilerId.cpp
| | | | | | |-a.out
| | | | | | |-tmp
| | | | | |-CMakeSystem.cmake
| | | | | |-CMakeCCompiler.cmake
| | | | | |-CMakeDetermineCompilerABI_CXX.bin
| | | | | |-CMakeDetermineCompilerABI_C.bin
| | | | |-my_box_bot_description_uninstall.dir
| | | | | |-build.make
| | | | | |-progress.make
| | | | | |-cmake_clean.cmake
| | | | | |-DependInfo.cmake
| | | | |-Makefile2
| | | | |-CMakeDirectoryInformation.cmake
| | | | |-progress.marks
| | | | |-CMakeOutput.log
| | | | |-cmake.check_cache
| | | | |-CMakeTmp
| | | | |-uninstall.dir
| | | | | |-build.make
| | | | | |-progress.make
| | | | | |-cmake_clean.cmake
| | | | | |-DependInfo.cmake
| | | | |-TargetDirectories.txt
| | | | |-CMakeRuleHashes.txt
| | | | |-Makefile.cmake
| | | |-ament_cmake_index
| | | | |-share
| | | | | |-ament_index
| | | | | | |-resource_index
| | | | | | | |-packages
| | | | | | | | |-my_box_bot_description
| | | | | | | |-parent_prefix_path
| | | | | | | | |-my_box_bot_description
| | | | | | | |-package_run_dependencies
| | | | | | | | |-my_box_bot_description
| | | |-ament_copyright
| | | |-colcon_command_prefix_build.sh.env
| | | |-CTestCustom.cmake
| | | |-ament_pep257
| | | |-CMakeCache.txt
| | | |-CTestConfiguration.ini
| | | |-colcon_command_prefix_build.sh
| | | |-cmake_args.last
| | | |-ament_cmake_uninstall_target
| | | | |-ament_cmake_uninstall_target.cmake
| | | |-colcon_build.rc
| | | |-ament_uncrustify
| | | |-ament_cppcheck
| | | |-ament_lint_cmake
| | | |-Makefile
| | |-COLCON_IGNORE
| |-urdf
| | |-box_bot_physcal_control.urdf
| | |-box_bot_control_complete_velocity.urdf
| | |-box_bot_meshes_collisions_inertias.urdf
| | |-box_bot_geometric_meshes.urdf
| | |-box_bot_simple_ex1-1.urdf
| | |-box_bot_geometric.urdf
| | |-box_bot_control_complete.urdf
| | |-box_bot_simple.urdf
| | |-box_bot_physcal_properties.urdf
| |-meshes
| | |-cute_cube.dae
| | |-sensors
| | | |-realsense.dae
| | | |-rplidar.dae
| | | |-rplidartexture.png
| | |-lambert3_baseColor.png
| | |-cute_cube.blend
| | |-textures
| | | |-lambert3_baseColor.png
| |-rviz
| | |-urdf_vis.rviz
| |-config
| | |-controller_position.yaml
| | |-controller_position_velocity.yaml
| |-log
| | |-build_2022-07-18_18-48-28
| | | |-logger_all.log
| | | |-my_box_bot_description
| | | | |-stderr.log
| | | | |-stdout_stderr.log
| | | | |-stdout.log
| | | | |-streams.log
| | | | |-command.log
| | | |-events.log
| | |-latest
| | |-latest_build
| | |-COLCON_IGNORE
| |-install
| | |-local_setup.zsh
| | |-my_box_bot_description
| | | |-share
| | | | |-my_box_bot_description
| | | | | |-local_setup.zsh
| | | | | |-package.xml
| | | | | |-local_setup.dsv
| | | | | |-package.ps1
| | | | | |-launch
| | | | | | |-urdf_visualize_meshes.launch.py
| | | | | | |-urdf_visualize_rviz_ex_1-1.launch.py
| | | | | | |-__pycache__
| | | | | | | |-urdf_visualize_meshes_collisions_inertias.launch.cpython-38.pyc
| | | | | | |-urdf_visualize_meshes_collisions_inertias.launch.py
| | | | | | |-urdf_visualize.launch.py
| | | | | | |-urdf_visualize_geometric.launch.py
| | | | | | |-urdf_visualize_rviz.launch.py
| | | | | |-package.bash
| | | | | |-hook
| | | | | | |-cmake_prefix_path.sh
| | | | | | |-cmake_prefix_path.ps1
| | | | | | |-cmake_prefix_path.dsv
| | | | | |-environment
| | | | | | |-path.dsv
| | | | | | |-ament_prefix_path.dsv
| | | | | | |-ament_prefix_path.sh
| | | | | | |-path.sh
| | | | | |-package.dsv
| | | | | |-urdf
| | | | | | |-box_bot_meshes_collisions_inertias.urdf
| | | | | | |-box_bot_geometric_meshes.urdf
| | | | | | |-box_bot_simple_ex1-1.urdf
| | | | | | |-box_bot_geometric.urdf
| | | | | | |-box_bot_simple.urdf
| | | | | |-meshes
| | | | | | |-cute_cube.dae
| | | | | | |-sensors
| | | | | | | |-realsense.dae
| | | | | | | |-rplidar.dae
| | | | | | | |-rplidartexture.png
| | | | | | |-lambert3_baseColor.png
| | | | | | |-cute_cube.blend
| | | | | | |-textures
| | | | | | | |-lambert3_baseColor.png
| | | | | |-rviz
| | | | | | |-urdf_vis.rviz
| | | | | |-cmake
| | | | | | |-my_box_bot_descriptionConfig.cmake
| | | | | | |-my_box_bot_descriptionConfig-version.cmake
| | | | | |-package.sh
| | | | | |-package.zsh
| | | | | |-local_setup.sh
| | | | | |-local_setup.bash
| | | | |-colcon-core
| | | | | |-packages
| | | | | | |-my_box_bot_description
| | | | |-ament_index
| | | | | |-resource_index
| | | | | | |-packages
| | | | | | | |-my_box_bot_description
| | | | | | |-parent_prefix_path
| | | | | | | |-my_box_bot_description
| | | | | | |-package_run_dependencies
| | | | | | | |-my_box_bot_description
| | |-setup.ps1
| | |-local_setup.ps1
| | |-_local_setup_util_sh.py
| | |-setup.sh
| | |-setup.bash
| | |-setup.zsh
| | |-.colcon_install_layout
| | |-local_setup.sh
| | |-_local_setup_util_ps1.py
| | |-COLCON_IGNORE
| | |-local_setup.bash
| |-CMakeLists.txt
|-my_box_bot_gazebo
| |-package.xml
| |-worlds
| | |-box_bot_empty.world
| |-launch
| | |-spawn_robot_ros2_physical.launch.xml
| | |-control.launch.py
| | |-control_position_velocity.launch.py
| | |-spawn_robot_ros2_control_velocity.launch.xml
| | |-spawn_robot_ros2.launch.xml
| | |-spawn_robot_ros2_control.launch.xml
| | |-spawn_robot_ros2_control_complete.launch.xml
| | |-spawn_robot_description.launch.py
| | |-spawn_robot_II.py
| | |-start_world.launch.py
| |-include
| | |-my_box_bot_gazebo
| |-src
| |-scripts
| | |-move_laser.py
| |-CMakeLists.txt
| |-models
| | |-box_room
| | | |-model.sdf
| | | |-meshes
| | | | |-box_room.dae
| | | | |-chambre.png
| | | |-model.config
|-move_laser.log
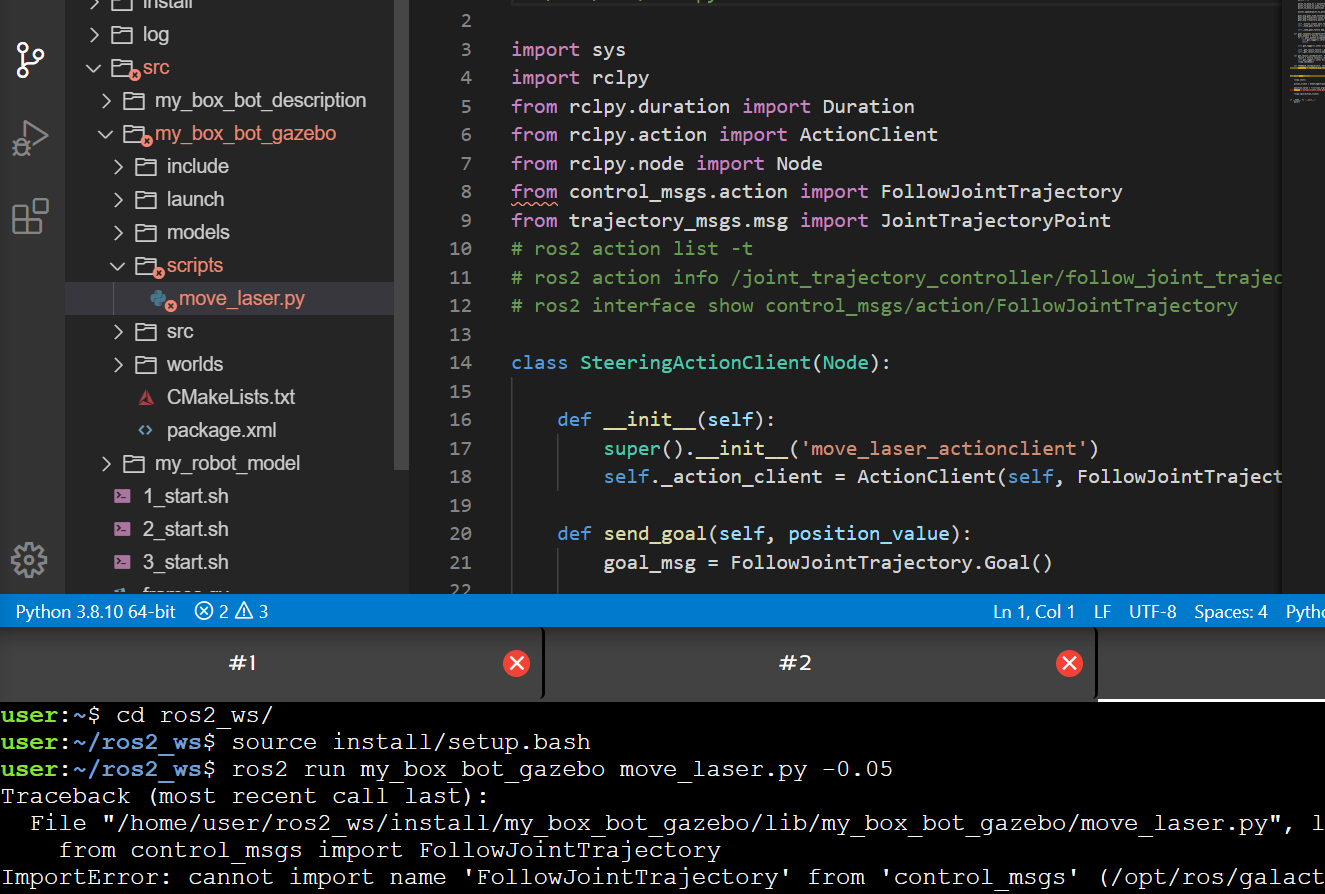
ros2 run my_box_bot_gazebo move_laser.py -0.05
Traceback (most recent call last):
File "/home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py", line 8, in <module>
from control_msgs import FollowJointTrajectory
ImportError: cannot import name 'FollowJointTrajectory' from 'control_msgs' (/opt/ros/galactic/lib/python3.8/site-packages/control_msgs/__init__.py)
CMakeLists.txt looks like that.
cmake_minimum_required(VERSION 3.8)
project(my_box_bot_gazebo)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclpy REQUIRED)
find_package(gazebo_ros REQUIRED)
find_package(my_box_bot_description REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
install(
DIRECTORY
launch
worlds
models
DESTINATION
share/${PROJECT_NAME}/
)
install(PROGRAMS
scripts/move_laser.py
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
I hope you eagle eye the problem.
Cheers,
rzegers
February 8, 2023, 9:05am
10
Hi @vkuehn ,
the error message that you posted indicates that you have this line of code in your move_laser.py script:
from control_msgs import FollowJointTrajectory
however the correct line for importing the Follow Joint Trajectory action is this one:
from control_msgs.action import FollowJointTrajectory
You are missing the .action after control_msgs
Before we continue please double check that you changed the import line to the correct one as pointed out in my previous reply:
rzegers:
Let us focus now on the issue with the import error message that you see.
In your first message you posted that this instruction is giving an error:
from control_msgs.action import FollowJointTrajectory
and now in your last message you have posted an error message like this:
from control_msgs.msg import FollowJointTrajectory
these two a different statements, can you see the difference?
Please I really need you to double check that you have the correct import statement.
I really need you to pay attention to this since you have already two times used wrong import statements and you need to understand that the error message is already pointing you to an error on this import line.
Also, please don’t forget post here the contents of your move_laser.py file as requested:
rzegers:
Then I need your complete version of the move_laser.py file. It it really important that you copy and paste the full file that you have here:
~/ros2_ws/src/my_box_bot_gazebo/scripts/move_laser.py
Copy paste the entire file here, please use code blocks for formatting, please double check that you are copying the correct file!
This will allow me to triple-chek that you have changed the import line indeed.
I am confident that we will get this solved,
Regards,
Roberto
vkuehn
February 9, 2023, 1:22pm
11
@rzegers
I understand your concerns but realy I just copy pasted it as all the other files.
the complete content
#! /usr/bin/env python3
import sys
import rclpy
from rclpy.duration import Duration
from rclpy.action import ActionClient
from rclpy.node import Node
from control_msgs.action import FollowJointTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
# ros2 action list -t
# ros2 action info /joint_trajectory_controller/follow_joint_trajectory -t
# ros2 interface show control_msgs/action/FollowJointTrajectory
class SteeringActionClient(Node):
def __init__(self):
super().__init__('move_laser_actionclient')
self._action_client = ActionClient(self, FollowJointTrajectory, '/joint_trajectory_controller/follow_joint_trajectory')
def send_goal(self, position_value):
goal_msg = FollowJointTrajectory.Goal()
# Fill in data for trajectory
joint_names = ["laser_scan_link_joint"]
points = []
point_to_move_to = JointTrajectoryPoint()
point_to_move_to.time_from_start = Duration(seconds=1, nanoseconds=0).to_msg()
point_to_move_to.positions = [position_value]
points.append(point_to_move_to)
goal_msg.goal_time_tolerance = Duration(seconds=1, nanoseconds=0).to_msg()
goal_msg.trajectory.joint_names = joint_names
goal_msg.trajectory.points = points
self._action_client.wait_for_server()
self._send_goal_future = self._action_client.send_goal_async(goal_msg, feedback_callback=self.feedback_callback)
self._send_goal_future.add_done_callback(self.goal_response_callback)
def goal_response_callback(self, future):
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().info('Goal rejected :(')
return
self.get_logger().info('Goal accepted :)')
self._get_result_future = goal_handle.get_result_async()
self._get_result_future.add_done_callback(self.get_result_callback)
def get_result_callback(self, future):
result = future.result().result
self.get_logger().info('Result: '+str(result))
rclpy.shutdown()
def feedback_callback(self, feedback_msg):
feedback = feedback_msg.feedback
def main(args=None):
rclpy.init()
action_client = SteeringActionClient()
position_value = float(sys.argv[1])
future = action_client.send_goal(position_value)
rclpy.spin(action_client)
if __name__ == '__main__':
main()
Thanks for keeping up your confidence
And still even after deleting build install log and do a complete rebuild the error looks the same
Regards,
rzegers
February 9, 2023, 2:48pm
12
Hello @vkuehn ,
thanks for posting the contents of your move_laser.py script and the full error message, we need that information in every post to be sure about the current state of the python script and to see if the error message has changes or not.
To me the situation at this moment is that the move_laser.py script in your package’s scripts directory has the correct import line BUT the script that is actually being executed has a different import line.
In that case, at the moment, I only can think of one possible cause:
The current version of the script has not been installed, and therefore an old version is being called when you run ros2 run my_box_bot_gazebo move_laser.py 0.0
To see the exact content of the file being executed please run this command in a terminal window:
cat /home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py
Then please maximize the shell window (click the icon at the lower right part of the shell window) and copy and paste the output of that command here.
This will show us the file being executed and how the import line in that file looks like.
Looking forward to your reply,
Roberto
vkuehn
February 10, 2023, 11:26am
13
Hello @rzegers ,
as it is to big for my screen here the content
#! /usr/bin/env python3
import sys
import rclpy
from rclpy.duration import Duration
from rclpy.action import ActionClient
from rclpy.node import Node
from control_msgs import FollowJointTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
# ros2 action list -t
# ros2 action info /joint_trajectory_controller/follow_joint_trajectory -t
# ros2 interface show control_msgs/action/FollowJointTrajectory
class SteeringActionClient(Node):
def __init__(self):
super().__init__('move_laser_actionclient')
self._action_client = ActionClient(self, FollowJointTrajectory, '/joint_trajectory_controller/follow_joint_trajectory')
def send_goal(self, position_value):
goal_msg = FollowJointTrajectory.Goal()
# Fill in data for trajectory
joint_names = ["laser_scan_link_joint"]
points = []
point_to_move_to = JointTrajectoryPoint()
point_to_move_to.time_from_start = Duration(seconds=1, nanoseconds=0).to_msg()
point_to_move_to.positions = [position_value]
points.append(point_to_move_to)
goal_msg.goal_time_tolerance = Duration(seconds=1, nanoseconds=0).to_msg()
goal_msg.trajectory.joint_names = joint_names
goal_msg.trajectory.points = points
self._action_client.wait_for_server()
self._send_goal_future = self._action_client.send_goal_async(goal_msg, feedback_callback=self.feedback_callback)
self._send_goal_future.add_done_callback(self.goal_response_callback)
def goal_response_callback(self, future):
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().info('Goal rejected :(')
return
self.get_logger().info('Goal accepted :)')
self._get_result_future = goal_handle.get_result_async()
self._get_result_future.add_done_callback(self.get_result_callback)
def get_result_callback(self, future):
result = future.result().result
self.get_logger().info('Result: '+str(result))
rclpy.shutdown()
def feedback_callback(self, feedback_msg):
feedback = feedback_msg.feedback
def main(args=None):
rclpy.init()
action_client = SteeringActionClient()
position_value = float(sys.argv[1])
future = action_client.send_goal(position_value)
rclpy.spin(action_client)
if __name__ == '__main__':
main()
And looks like you are right. Odd I could swear I have deleted multiple times the install and build paths.
Regards,
rzegers
February 10, 2023, 11:40am
14
Hi @vkuehn ,
thanks for posting the contents of
/home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py
which is the installed file as you can see the path is
/home/user/ros2_ws/install /my_box_bot_gazebo/
and not
/home/user/ros2_ws/src /my_box_bot_gazebo/
This explains why, even when you changed the python file inside you package you will still getting the same error.
Now the next step is to clean the build , install and log directories inside your ros2_ws.
cd ~/ros2_ws
rm -rf build install log
ls
Execute ls to confirm the operation. Please post the output of ls here.
cat /home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py
This should output an error message , please paste the error message here just to confirm that this step is ok before we proceed.
Cheers,
Roberto
vkuehn
February 10, 2023, 12:20pm
15
Hi @rzegers ,
ls shows just the src folder now.
Therefore cat shows
at: /home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py: No such file or directory
Cheers,
rzegers
February 10, 2023, 12:25pm
16
Hi @vkuehn ,
that is very good, now we have a clean state from which to start.
next step is to compile and source your workspace again:
cd ~ros2_ws
colcon build
source install/setup.bash
Next let’s see if the python file exists inside /home/user/ros2_ws/install/ to do so please run this command again:
cat /home/user/ros2_ws/install/my_box_bot_gazebo/lib/my_box_bot_gazebo/move_laser.py
It should show the the source code of move_laser.py , please post it here so we can both confirm that this version now has the correct import statement line.
Cheers,
Roberto
vkuehn
February 10, 2023, 12:35pm
17
yehaa…
#! /usr/bin/env python3
import sys
import rclpy
from rclpy.duration import Duration
from rclpy.action import ActionClient
from rclpy.node import Node
from control_msgs.action import FollowJointTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
# ros2 action list -t
# ros2 action info /joint_trajectory_controller/follow_joint_trajectory -t
# ros2 interface show control_msgs/action/FollowJointTrajectory
class SteeringActionClient(Node):
def __init__(self):
super().__init__('move_laser_actionclient')
self._action_client = ActionClient(self, FollowJointTrajectory, '/joint_trajectory_controller/follow_joint_trajectory')
def send_goal(self, position_value):
goal_msg = FollowJointTrajectory.Goal()
# Fill in data for trajectory
joint_names = ["laser_scan_link_joint"]
points = []
point_to_move_to = JointTrajectoryPoint()
point_to_move_to.time_from_start = Duration(seconds=1, nanoseconds=0).to_msg()
point_to_move_to.positions = [position_value]
points.append(point_to_move_to)
goal_msg.goal_time_tolerance = Duration(seconds=1, nanoseconds=0).to_msg()
goal_msg.trajectory.joint_names = joint_names
goal_msg.trajectory.points = points
self._action_client.wait_for_server()
self._send_goal_future = self._action_client.send_goal_async(goal_msg, feedback_callback=self.feedback_callback)
self._send_goal_future.add_done_callback(self.goal_response_callback)
def goal_response_callback(self, future):
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().info('Goal rejected :(')
return
self.get_logger().info('Goal accepted :)')
self._get_result_future = goal_handle.get_result_async()
self._get_result_future.add_done_callback(self.get_result_callback)
def get_result_callback(self, future):
result = future.result().result
self.get_logger().info('Result: '+str(result))
rclpy.shutdown()
def feedback_callback(self, feedback_msg):
feedback = feedback_msg.feedback
def main(args=None):
rclpy.init()
action_client = SteeringActionClient()
position_value = float(sys.argv[1])
future = action_client.send_goal(position_value)
rclpy.spin(action_client)
if __name__ == '__main__':
main()
Very odd I would have thought I have done all this. However it looks ok right ?
Cheers,
rzegers
February 10, 2023, 12:40pm
18
Hi @vkuehn ,
yes it looks correct now. This is the line we care about and it looks just fine:
from control_msgs.action import FollowJointTrajectory
Last step is to execute it, just run the ros2 run command:
ros2 run my_box_bot_gazebo move_laser.py 0.0
Fingers crossed!
Cheers,
Roberto
vkuehn
February 10, 2023, 12:52pm
19
Hi @rzegers ,
nothing happens and still the issue is that the action package can’t be resolved
Cheers,
rzegers
February 10, 2023, 12:54pm
20
hi @vkuehn ,
you can ignore that red underline that is shown in the code editor for now. Please execute the ros2 run command and see if there is an error message or if it runs.
Cheers,
Roberto