I’m trying to work on the Nav course and in Units 1 and 2 the map fixed frame doesn’t exist. I manually type it in and it causes the Global status, RobotModel, and LaserScan to go into error states. If I set the fixed frame to base link those recover. Either way the map visualization stays in a warning state with no map received. I’ve tried restarting the sim a few times and that doesn’t fix it. Any idea what’s going on and how to fix it?
Hello @justin.smith ,
Can you please describe the steps followed in order to reproduce this issue? I’ve been doing some tests in Unit 1 right now and it is working ok for me.
Thanks for getting back to me, @albertoezquerro . For example, if I do example 1.2 the command for shell 1 puts out the following warning
[ WARN] [1643654100.594725607, 15.601000000]: No laser scan received (and thus no pose updates have been published) for 15.601000 seconds. Verify that data is being published on the/kobuki/laser/scan topic.
The command for shell 2 lets me change the velocity but not move the robot and RViz, from shell 3, comes up will a global status error of “Unknown Frame Map”. I ran all 3 commands in order, exactly how the exercise says to, and have tried restarting the sim as well with no luck.
Hello @justin.smith ,
I’m sorry, but I’m not able to reproduce your issue. Could you please record a video (capture your screen) of the whole process so that I can exactly see what you are doing and the issues you are having? You can send the video to me here: aezquerro@theconstructsim.com
Hello I’m facing the same problem.
I just followed every command in URDF Course, Unit 2: Building the Visual Robot Model with URDF
when running roslaunch my_mira_description urdf_visualize.launch model:=‘$(find my_mira_description)/urdf/mira_simple.urdf’, same problem happens in my rviz – errors in Global status, RobotModel and TF
I don’t understand your question @mileswang22
The question of this thread is about navigation but you are asking about URDF.
Also, your report is not good enough to provide you any solution. Please take a screenshot of the rviz where so see the error (FULL SCREEEN screenshot, not just a corner or small space!!! We need the full information to debug your problems)
Also put here the commands you are launching, the output on the terminals about it… all the information that may help us figure out what is happening
Thanks @rtellez for replying. The similar question in URDF subject was closed and I searched for “Global status” error thats why I ended up here.
The command I was running: roslaunch my_mira_description urdf_visualize.launch model:=‘$(find my_mira_description)/urdf/mira_simple.urdf’
Output is:
... logging to /home/user/.ros/log/e07c76d4-bcc3-11ee-be7e-0242c0a8b006/roslaunch-1_xterm-1423.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://1_xterm:36469/
SUMMARY
========
PARAMETERS
* /robot_description: <?xml version="1....
* /rosdistro: noetic
* /rosversion: 1.15.11
NODES
/
joint_state_publisher_gui (joint_state_publisher_gui/joint_state_publisher_gui)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
auto-starting new master
process[master]: started with pid [1449]
ROS_MASTER_URI=http://1_xterm:11311
setting /run_id to e07c76d4-bcc3-11ee-be7e-0242c0a8b006
process[rosout-1]: started with pid [1472]
started core service [/rosout]
process[joint_state_publisher_gui-2]: started with pid [1475]
process[robot_state_publisher-3]: started with pid [1490]
process[rviz-4]: started with pid [1498]
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user'
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user'
[ WARN] [1706326003.114193014]: Shutdown request received.
[ WARN] [1706326003.126783226]: Reason given for shutdown: [[/robot_state_publisher] Reason: new node registered with same name]
[robot_state_publisher-3] process has finished cleanly
log file: /home/user/.ros/log/e07c76d4-bcc3-11ee-be7e-0242c0a8b006/robot_state_publisher-3*.log
[ERROR] [1706326048.430124689]: couldn't resolve publisher host [1_simulation]
[ERROR] [1706326048.432286470]: couldn't resolve publisher host [1_simulation]
Here is my rviz screeshot:
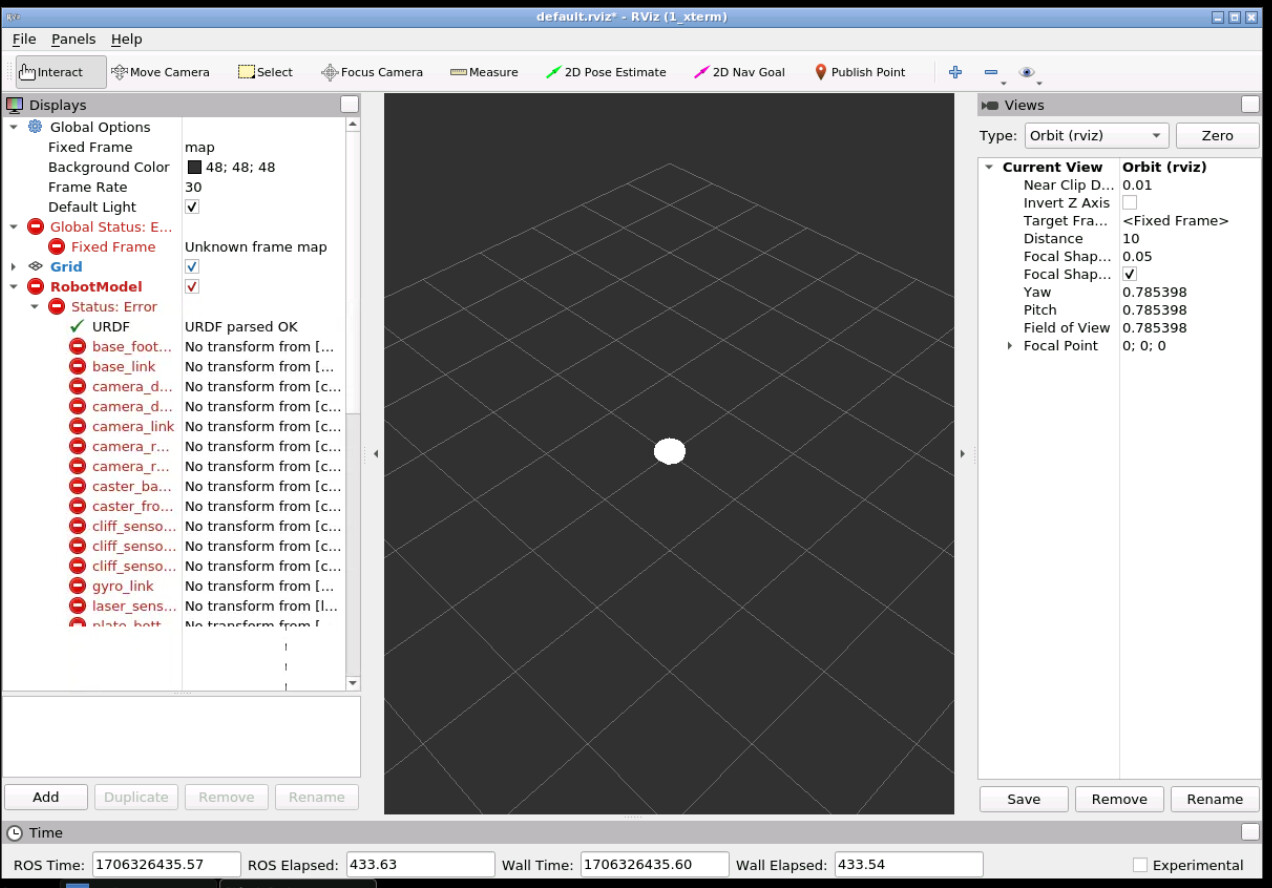
It turns out that I didn’t change the “Fixed Frame” to a link which led to errors. Now everything is good
1 Like