Dear Prof,
I studied the solution of exe 3.10
Would you please tell me the following:
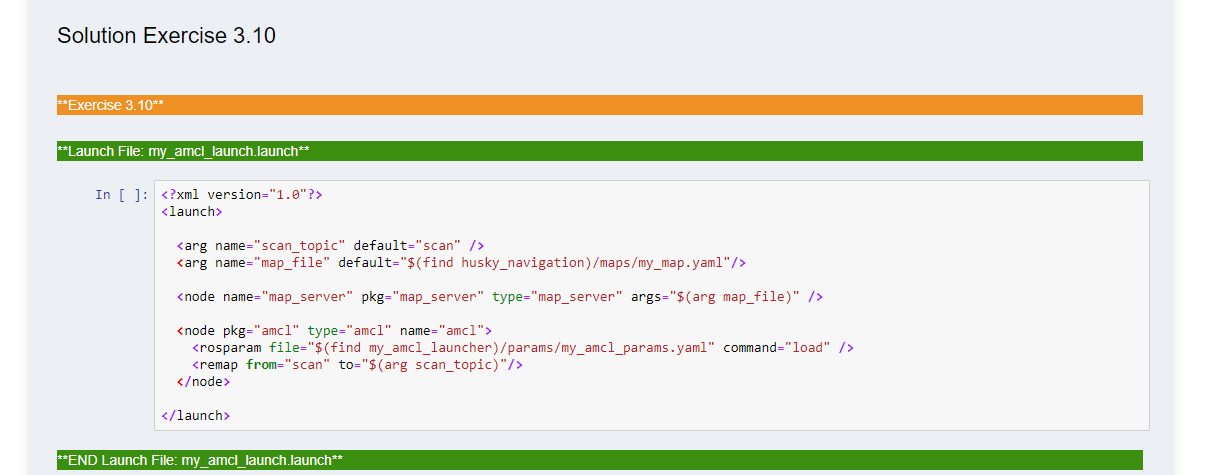
- Do we call the map_server so that the amcl node can publish to it ? Also, how are amcl and map connected. map_server is a separate node while amcl is a separate. Apparently they don’t have any connection with each other.
- What’s the function of the line:
<remap from="scan" to="$(arg scan_topic)"/> - Where is the /odom topic. Because, I read in the notebook that the amcl node subsribes to both laser and odom topics and publishes to /map.