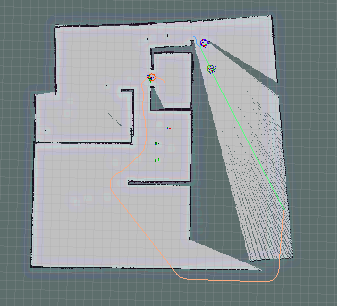
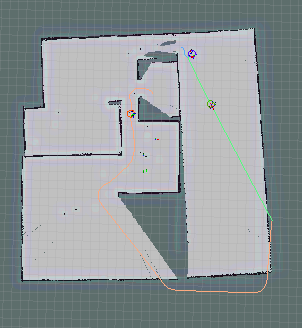
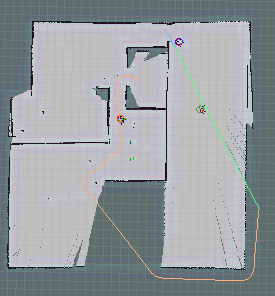
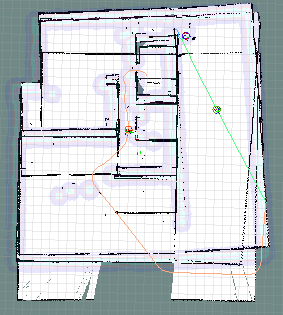
I am working on a Multiple Robot map merging project based on the Robot Operating System. Most of the project is completed and working fine, the only problem I am facing is map merging. I using a package multirobot_map_merge which merge maps produced by different robots but it is not merging maps properly pictures are attached below. I am unable to find a reason.
launch file for map merging map_merge.launch
<launch>
<group ns="map_merge">
<node pkg="multirobot_map_merge" type="map_merge" respawn="false" name="map_merge" output="screen">
<param name="robot_map_topic" value="map"/>
<param name="robot_namespace" value=""/>
<param name="merged_map_topic" value="map"/>
<param name="world_frame" value="world"/>
<param name="known_init_poses" value="true"/>
<param name="merging_rate" value="0.5"/>
<param name="discovery_rate" value="0.05"/>
<param name="estimation_rate" value="0.1"/>
<param name="estimation_confidence" value="1.0"/>
</node>
</group>
</launch>