RishiM
March 10, 2023, 2:44pm
1
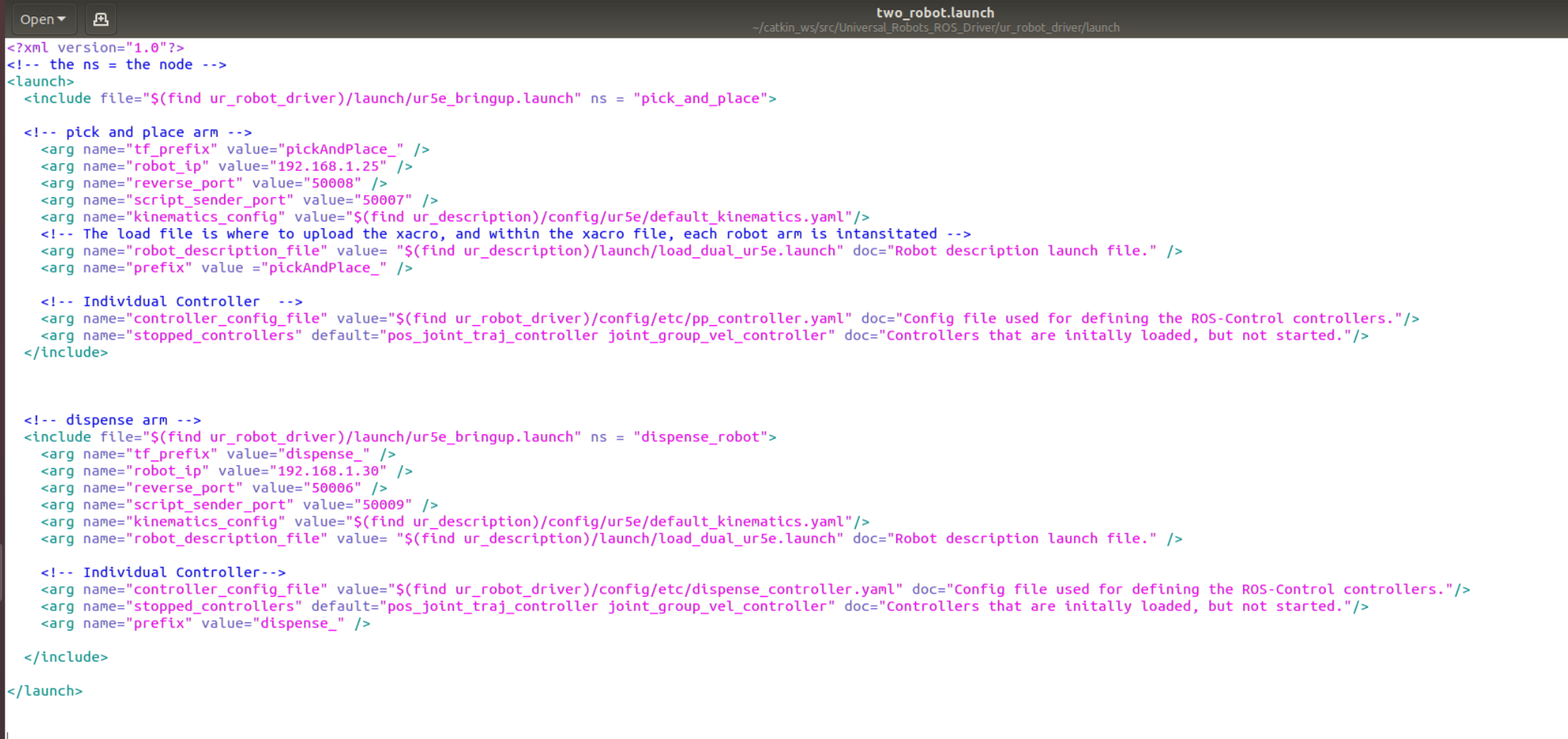
Hey guys, I am trying to set up dual robot communication between 2 UR5e. I am using Universal_Robot_ROS_Driver with ubuntu 18.04, melodic and ROS1. IT seems like I am only able to run the joints of 1 robot, but not the other robot. I have spent a few days on this task and not too sure how to approach this problem. Would appreciate some help! Thanks in advance!
As there are word limit, I’m uploading the second part of the output in the reply section!
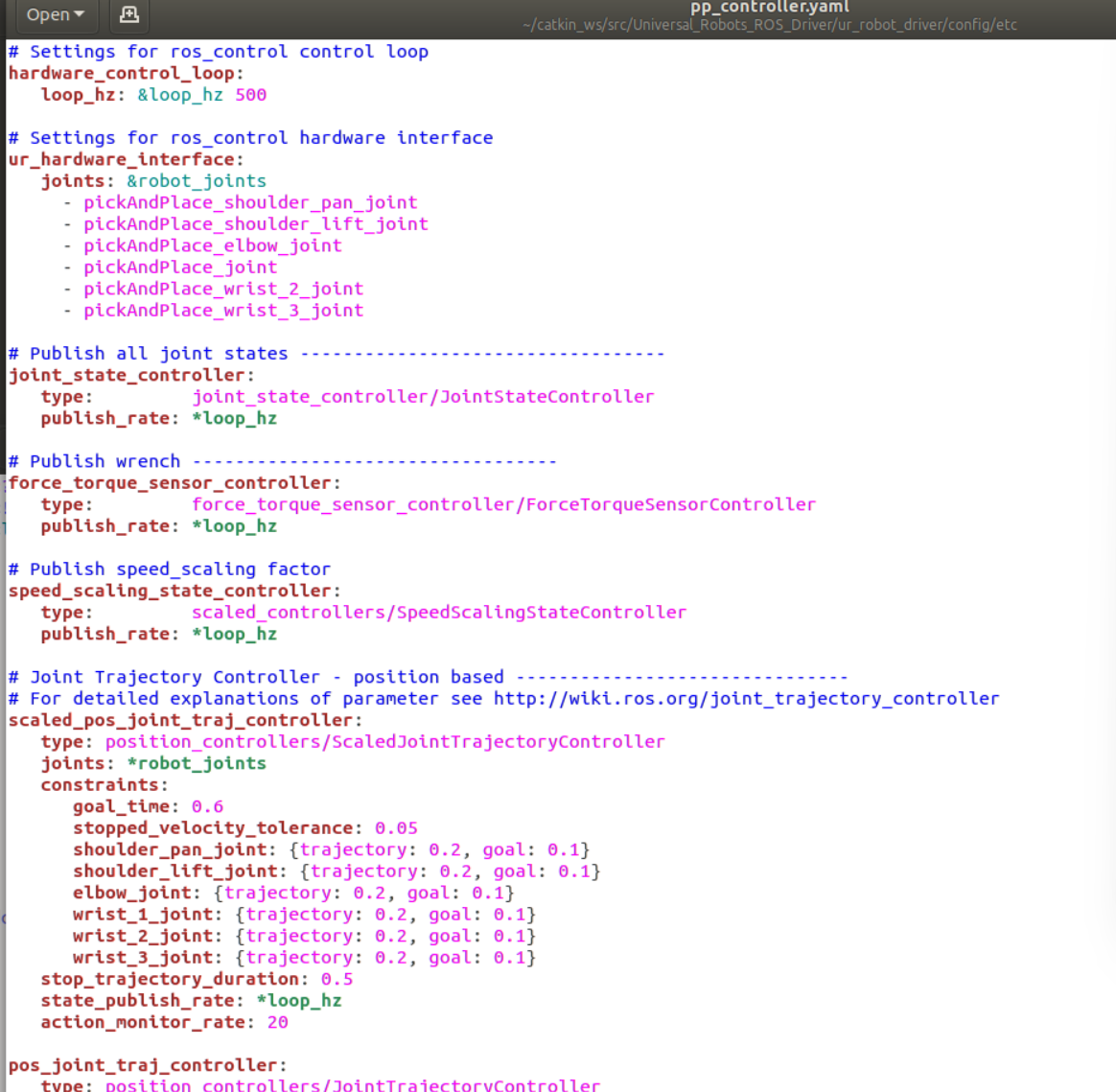
I listed out the general dual robot configuration I have done, I have uploaded an example image of what the xml files looks like (I am not allowed multiple images), but the full complete package can be found on my github: UR5 Error
Re-configured the urdf file to contain a world frame to be the parent of the two robot, with each
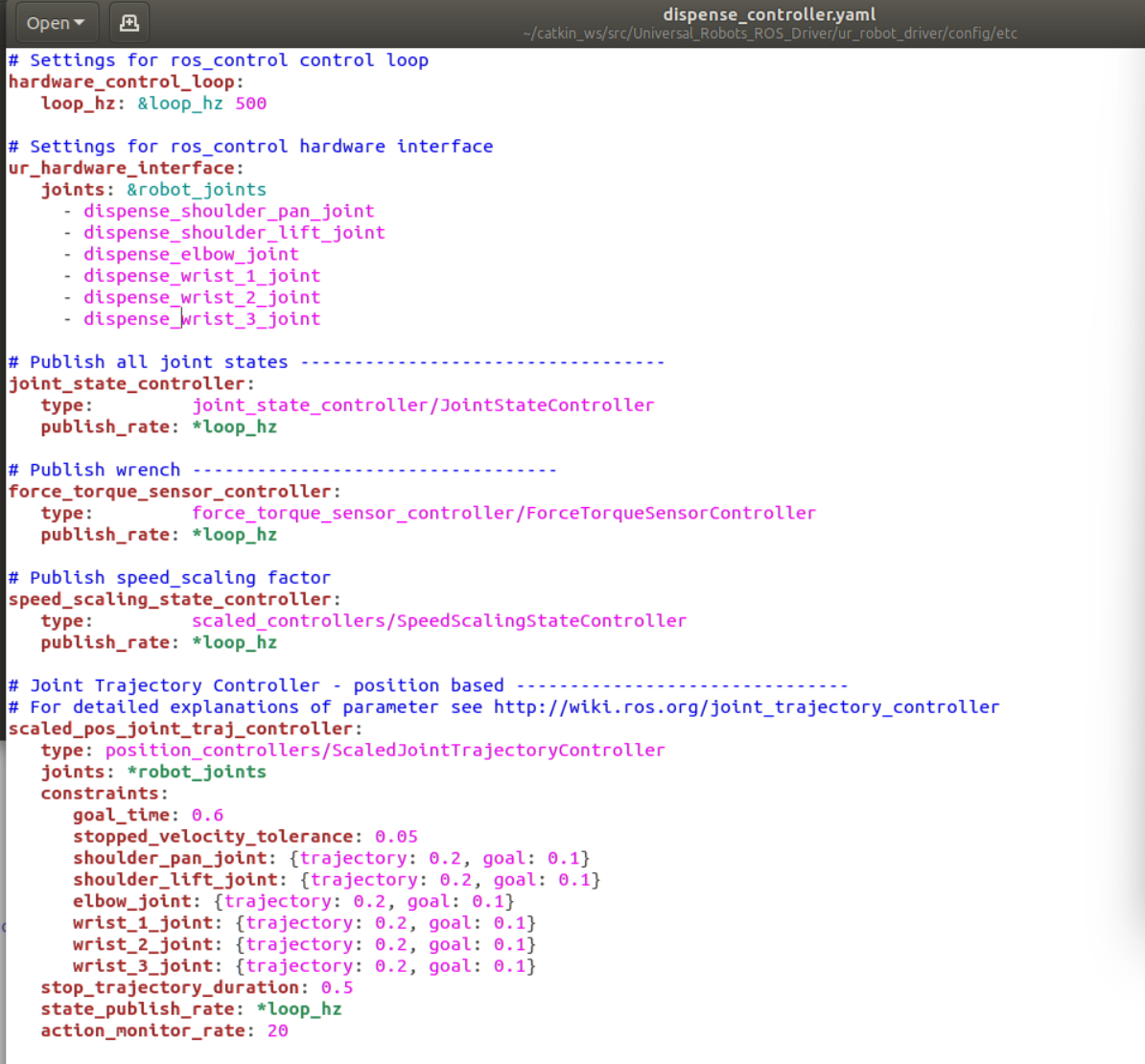
Made a copy of the controller.yaml and changed the name of each joint in the format of “prefix” + “joint name”
Made a new load file that upload the urdf information to the server
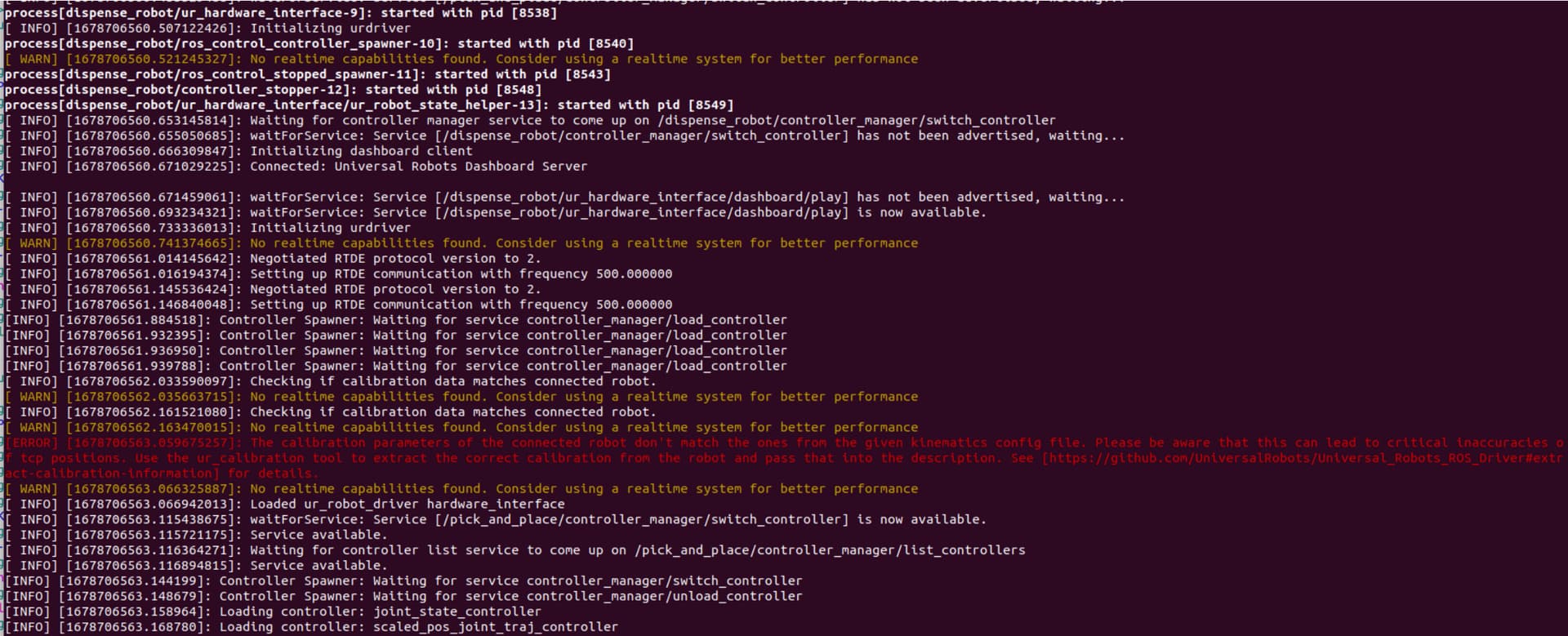
Here are the complete output
PARAMETERS
* /dispense_robot/controller_stopper/consistent_controllers: ['joint_state_con...
* /dispense_robot/force_torque_sensor_controller/publish_rate: 500
* /dispense_robot/force_torque_sensor_controller/type: force_torque_sens...
* /dispense_robot/forward_cartesian_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/forward_cartesian_traj_controller/type: pass_through_cont...
* /dispense_robot/forward_joint_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/forward_joint_traj_controller/type: pass_through_cont...
* /dispense_robot/hardware_control_loop/loop_hz: 500
* /dispense_robot/joint_based_cartesian_traj_controller/base: base
* /dispense_robot/joint_based_cartesian_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/joint_based_cartesian_traj_controller/tip: tool0
* /dispense_robot/joint_based_cartesian_traj_controller/type: position_controll...
* /dispense_robot/joint_group_vel_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/joint_group_vel_controller/type: velocity_controll...
* /dispense_robot/joint_state_controller/publish_rate: 500
* /dispense_robot/joint_state_controller/type: joint_state_contr...
* /dispense_robot/pos_joint_traj_controller/action_monitor_rate: 20
* /dispense_robot/pos_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /dispense_robot/pos_joint_traj_controller/constraints/elbow_joint/trajectory: 0.2
* /dispense_robot/pos_joint_traj_controller/constraints/goal_time: 0.6
* /dispense_robot/pos_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /dispense_robot/pos_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.2
* /dispense_robot/pos_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /dispense_robot/pos_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.2
* /dispense_robot/pos_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /dispense_robot/pos_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /dispense_robot/pos_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.2
* /dispense_robot/pos_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /dispense_robot/pos_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.2
* /dispense_robot/pos_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /dispense_robot/pos_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.2
* /dispense_robot/pos_joint_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/pos_joint_traj_controller/state_publish_rate: 500
* /dispense_robot/pos_joint_traj_controller/stop_trajectory_duration: 0.5
* /dispense_robot/pos_joint_traj_controller/type: position_controll...
* /dispense_robot/pose_based_cartesian_traj_controller/base: base
* /dispense_robot/pose_based_cartesian_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/pose_based_cartesian_traj_controller/tip: tool0_controller
* /dispense_robot/pose_based_cartesian_traj_controller/type: pose_controllers/...
* /dispense_robot/robot_description: <?xml version="1....
* /dispense_robot/robot_status_controller/handle_name: industrial_robot_...
* /dispense_robot/robot_status_controller/publish_rate: 10
* /dispense_robot/robot_status_controller/type: industrial_robot_...
* /dispense_robot/scaled_pos_joint_traj_controller/action_monitor_rate: 20
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/elbow_joint/trajectory: 0.2
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/goal_time: 0.6
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.2
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.2
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.2
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.2
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /dispense_robot/scaled_pos_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.2
* /dispense_robot/scaled_pos_joint_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/scaled_pos_joint_traj_controller/state_publish_rate: 500
* /dispense_robot/scaled_pos_joint_traj_controller/stop_trajectory_duration: 0.5
* /dispense_robot/scaled_pos_joint_traj_controller/type: position_controll...
* /dispense_robot/scaled_vel_joint_traj_controller/action_monitor_rate: 20
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/elbow_joint/trajectory: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/goal_time: 0.6
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/elbow_joint/d: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/elbow_joint/i: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/gains/elbow_joint/i_clamp: 1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/elbow_joint/p: 5.0
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/d: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/i: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/i_clamp: 1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/p: 5.0
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/d: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/i: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/i_clamp: 1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/p: 5.0
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_1_joint/d: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_1_joint/i: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_1_joint/i_clamp: 1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_1_joint/p: 5.0
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_2_joint/d: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_2_joint/i: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_2_joint/i_clamp: 1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_2_joint/p: 5.0
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_3_joint/d: 0.1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_3_joint/i: 0.05
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_3_joint/i_clamp: 1
* /dispense_robot/scaled_vel_joint_traj_controller/gains/wrist_3_joint/p: 5.0
* /dispense_robot/scaled_vel_joint_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/scaled_vel_joint_traj_controller/state_publish_rate: 500
* /dispense_robot/scaled_vel_joint_traj_controller/stop_trajectory_duration: 0.5
* /dispense_robot/scaled_vel_joint_traj_controller/type: velocity_controll...
* /dispense_robot/scaled_vel_joint_traj_controller/velocity_ff/elbow_joint: 1.0
* /dispense_robot/scaled_vel_joint_traj_controller/velocity_ff/shoulder_lift_joint: 1.0
* /dispense_robot/scaled_vel_joint_traj_controller/velocity_ff/shoulder_pan_joint: 1.0
* /dispense_robot/scaled_vel_joint_traj_controller/velocity_ff/wrist_1_joint: 1.0
* /dispense_robot/scaled_vel_joint_traj_controller/velocity_ff/wrist_2_joint: 1.0
* /dispense_robot/scaled_vel_joint_traj_controller/velocity_ff/wrist_3_joint: 1.0
* /dispense_robot/speed_scaling_state_controller/publish_rate: 500
* /dispense_robot/speed_scaling_state_controller/type: scaled_controller...
* /dispense_robot/twist_controller/frame_id: tool0_controller
* /dispense_robot/twist_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/twist_controller/publish_rate: 500
* /dispense_robot/twist_controller/type: ros_controllers_c...
* /dispense_robot/ur_hardware_interface/headless_mode: False
* /dispense_robot/ur_hardware_interface/input_recipe_file: /home/cheungy/cat...
* /dispense_robot/ur_hardware_interface/joints: ['shoulder_pan_jo...
* /dispense_robot/ur_hardware_interface/kinematics/forearm/pitch: 0
* /dispense_robot/ur_hardware_interface/kinematics/forearm/roll: 0
* /dispense_robot/ur_hardware_interface/kinematics/forearm/x: -0.425
* /dispense_robot/ur_hardware_interface/kinematics/forearm/y: 0
* /dispense_robot/ur_hardware_interface/kinematics/forearm/yaw: 0
* /dispense_robot/ur_hardware_interface/kinematics/forearm/z: 0
* /dispense_robot/ur_hardware_interface/kinematics/hash: calib_12788084448...
* /dispense_robot/ur_hardware_interface/kinematics/shoulder/pitch: 0
* /dispense_robot/ur_hardware_interface/kinematics/shoulder/roll: 0
* /dispense_robot/ur_hardware_interface/kinematics/shoulder/x: 0
* /dispense_robot/ur_hardware_interface/kinematics/shoulder/y: 0
* /dispense_robot/ur_hardware_interface/kinematics/shoulder/yaw: 0
* /dispense_robot/ur_hardware_interface/kinematics/shoulder/z: 0.1625
* /dispense_robot/ur_hardware_interface/kinematics/upper_arm/pitch: 0
* /dispense_robot/ur_hardware_interface/kinematics/upper_arm/roll: 1.570796327
* /dispense_robot/ur_hardware_interface/kinematics/upper_arm/x: 0
* /dispense_robot/ur_hardware_interface/kinematics/upper_arm/y: 0
* /dispense_robot/ur_hardware_interface/kinematics/upper_arm/yaw: 0
* /dispense_robot/ur_hardware_interface/kinematics/upper_arm/z: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_1/pitch: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_1/roll: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_1/x: -0.3922
* /dispense_robot/ur_hardware_interface/kinematics/wrist_1/y: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_1/yaw: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_1/z: 0.1333
* /dispense_robot/ur_hardware_interface/kinematics/wrist_2/pitch: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_2/roll: 1.570796327
* /dispense_robot/ur_hardware_interface/kinematics/wrist_2/x: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_2/y: -0.0997
* /dispense_robot/ur_hardware_interface/kinematics/wrist_2/yaw: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_2/z: -2.0448811823e-11
* /dispense_robot/ur_hardware_interface/kinematics/wrist_3/pitch: 3.14159265359
* /dispense_robot/ur_hardware_interface/kinematics/wrist_3/roll: 1.57079632659
* /dispense_robot/ur_hardware_interface/kinematics/wrist_3/x: 0
* /dispense_robot/ur_hardware_interface/kinematics/wrist_3/y: 0.0996
* /dispense_robot/ur_hardware_interface/kinematics/wrist_3/yaw: 3.14159265359
* /dispense_robot/ur_hardware_interface/kinematics/wrist_3/z: -2.04283014801e-11
* /dispense_robot/ur_hardware_interface/output_recipe_file: /home/cheungy/cat...
* /dispense_robot/ur_hardware_interface/reverse_ip:
* /dispense_robot/ur_hardware_interface/reverse_port: 50000
* /dispense_robot/ur_hardware_interface/robot_ip: 192.168.1.30
* /dispense_robot/ur_hardware_interface/script_command_port: 50004
* /dispense_robot/ur_hardware_interface/script_file: /opt/ros/melodic/...
* /dispense_robot/ur_hardware_interface/script_sender_port: 50005
* /dispense_robot/ur_hardware_interface/servoj_gain: 2000
* /dispense_robot/ur_hardware_interface/servoj_lookahead_time: 0.03
* /dispense_robot/ur_hardware_interface/tf_prefix: dispense_
* /dispense_robot/ur_hardware_interface/tool_baud_rate: 115200
* /dispense_robot/ur_hardware_interface/tool_parity: 0
* /dispense_robot/ur_hardware_interface/tool_rx_idle_chars: 1.5
* /dispense_robot/ur_hardware_interface/tool_stop_bits: 1
* /dispense_robot/ur_hardware_interface/tool_tx_idle_chars: 3.5
* /dispense_robot/ur_hardware_interface/tool_voltage: 0
* /dispense_robot/ur_hardware_interface/trajectory_port: 50003
* /dispense_robot/ur_hardware_interface/use_tool_communication: False
* /dispense_robot/vel_joint_traj_controller/action_monitor_rate: 20
* /dispense_robot/vel_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/elbow_joint/trajectory: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/goal_time: 0.6
* /dispense_robot/vel_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /dispense_robot/vel_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /dispense_robot/vel_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/elbow_joint/d: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/elbow_joint/i: 0.05
* /dispense_robot/vel_joint_traj_controller/gains/elbow_joint/i_clamp: 1
* /dispense_robot/vel_joint_traj_controller/gains/elbow_joint/p: 5.0
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_lift_joint/d: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_lift_joint/i: 0.05
RishiM
March 10, 2023, 2:50pm
5
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_lift_joint/i_clamp: 1
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_lift_joint/p: 5.0
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_pan_joint/d: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_pan_joint/i: 0.05
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_pan_joint/i_clamp: 1
* /dispense_robot/vel_joint_traj_controller/gains/shoulder_pan_joint/p: 5.0
* /dispense_robot/vel_joint_traj_controller/gains/wrist_1_joint/d: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/wrist_1_joint/i: 0.05
* /dispense_robot/vel_joint_traj_controller/gains/wrist_1_joint/i_clamp: 1
* /dispense_robot/vel_joint_traj_controller/gains/wrist_1_joint/p: 5.0
* /dispense_robot/vel_joint_traj_controller/gains/wrist_2_joint/d: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/wrist_2_joint/i: 0.05
* /dispense_robot/vel_joint_traj_controller/gains/wrist_2_joint/i_clamp: 1
* /dispense_robot/vel_joint_traj_controller/gains/wrist_2_joint/p: 5.0
* /dispense_robot/vel_joint_traj_controller/gains/wrist_3_joint/d: 0.1
* /dispense_robot/vel_joint_traj_controller/gains/wrist_3_joint/i: 0.05
* /dispense_robot/vel_joint_traj_controller/gains/wrist_3_joint/i_clamp: 1
* /dispense_robot/vel_joint_traj_controller/gains/wrist_3_joint/p: 5.0
* /dispense_robot/vel_joint_traj_controller/joints: ['shoulder_pan_jo...
* /dispense_robot/vel_joint_traj_controller/state_publish_rate: 500
* /dispense_robot/vel_joint_traj_controller/stop_trajectory_duration: 0.5
* /dispense_robot/vel_joint_traj_controller/type: velocity_controll...
* /dispense_robot/vel_joint_traj_controller/velocity_ff/elbow_joint: 1.0
* /dispense_robot/vel_joint_traj_controller/velocity_ff/shoulder_lift_joint: 1.0
* /dispense_robot/vel_joint_traj_controller/velocity_ff/shoulder_pan_joint: 1.0
* /dispense_robot/vel_joint_traj_controller/velocity_ff/wrist_1_joint: 1.0
* /dispense_robot/vel_joint_traj_controller/velocity_ff/wrist_2_joint: 1.0
* /dispense_robot/vel_joint_traj_controller/velocity_ff/wrist_3_joint: 1.0
* /pick_and_place/controller_stopper/consistent_controllers: ['joint_state_con...
* /pick_and_place/force_torque_sensor_controller/publish_rate: 500
* /pick_and_place/force_torque_sensor_controller/type: force_torque_sens...
* /pick_and_place/forward_cartesian_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/forward_cartesian_traj_controller/type: pass_through_cont...
* /pick_and_place/forward_joint_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/forward_joint_traj_controller/type: pass_through_cont...
* /pick_and_place/hardware_control_loop/loop_hz: 500
* /pick_and_place/joint_based_cartesian_traj_controller/base: base
* /pick_and_place/joint_based_cartesian_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/joint_based_cartesian_traj_controller/tip: tool0
* /pick_and_place/joint_based_cartesian_traj_controller/type: position_controll...
* /pick_and_place/joint_group_vel_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/joint_group_vel_controller/type: velocity_controll...
* /pick_and_place/joint_state_controller/publish_rate: 500
* /pick_and_place/joint_state_controller/type: joint_state_contr...
* /pick_and_place/pos_joint_traj_controller/action_monitor_rate: 20
* /pick_and_place/pos_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /pick_and_place/pos_joint_traj_controller/constraints/elbow_joint/trajectory: 0.2
* /pick_and_place/pos_joint_traj_controller/constraints/goal_time: 0.6
* /pick_and_place/pos_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /pick_and_place/pos_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.2
* /pick_and_place/pos_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /pick_and_place/pos_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.2
* /pick_and_place/pos_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /pick_and_place/pos_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /pick_and_place/pos_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.2
* /pick_and_place/pos_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /pick_and_place/pos_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.2
* /pick_and_place/pos_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /pick_and_place/pos_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.2
* /pick_and_place/pos_joint_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/pos_joint_traj_controller/state_publish_rate: 500
* /pick_and_place/pos_joint_traj_controller/stop_trajectory_duration: 0.5
* /pick_and_place/pos_joint_traj_controller/type: position_controll...
* /pick_and_place/pose_based_cartesian_traj_controller/base: base
* /pick_and_place/pose_based_cartesian_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/pose_based_cartesian_traj_controller/tip: tool0_controller
* /pick_and_place/pose_based_cartesian_traj_controller/type: pose_controllers/...
* /pick_and_place/robot_description: <?xml version="1....
* /pick_and_place/robot_status_controller/handle_name: industrial_robot_...
* /pick_and_place/robot_status_controller/publish_rate: 10
* /pick_and_place/robot_status_controller/type: industrial_robot_...
* /pick_and_place/scaled_pos_joint_traj_controller/action_monitor_rate: 20
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/elbow_joint/trajectory: 0.2
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/goal_time: 0.6
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.2
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.2
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.2
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.2
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /pick_and_place/scaled_pos_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.2
* /pick_and_place/scaled_pos_joint_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/scaled_pos_joint_traj_controller/state_publish_rate: 500
* /pick_and_place/scaled_pos_joint_traj_controller/stop_trajectory_duration: 0.5
* /pick_and_place/scaled_pos_joint_traj_controller/type: position_controll...
* /pick_and_place/scaled_vel_joint_traj_controller/action_monitor_rate: 20
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/elbow_joint/trajectory: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/goal_time: 0.6
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/elbow_joint/d: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/elbow_joint/i: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/gains/elbow_joint/i_clamp: 1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/elbow_joint/p: 5.0
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/d: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/i: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/i_clamp: 1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_lift_joint/p: 5.0
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/d: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/i: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/i_clamp: 1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/shoulder_pan_joint/p: 5.0
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_1_joint/d: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_1_joint/i: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_1_joint/i_clamp: 1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_1_joint/p: 5.0
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_2_joint/d: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_2_joint/i: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_2_joint/i_clamp: 1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_2_joint/p: 5.0
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_3_joint/d: 0.1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_3_joint/i: 0.05
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_3_joint/i_clamp: 1
* /pick_and_place/scaled_vel_joint_traj_controller/gains/wrist_3_joint/p: 5.0
* /pick_and_place/scaled_vel_joint_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/scaled_vel_joint_traj_controller/state_publish_rate: 500
* /pick_and_place/scaled_vel_joint_traj_controller/stop_trajectory_duration: 0.5
* /pick_and_place/scaled_vel_joint_traj_controller/type: velocity_controll...
* /pick_and_place/scaled_vel_joint_traj_controller/velocity_ff/elbow_joint: 1.0
* /pick_and_place/scaled_vel_joint_traj_controller/velocity_ff/shoulder_lift_joint: 1.0
* /pick_and_place/scaled_vel_joint_traj_controller/velocity_ff/shoulder_pan_joint: 1.0
* /pick_and_place/scaled_vel_joint_traj_controller/velocity_ff/wrist_1_joint: 1.0
* /pick_and_place/scaled_vel_joint_traj_controller/velocity_ff/wrist_2_joint: 1.0
* /pick_and_place/scaled_vel_joint_traj_controller/velocity_ff/wrist_3_joint: 1.0
* /pick_and_place/speed_scaling_state_controller/publish_rate: 500
* /pick_and_place/speed_scaling_state_controller/type: scaled_controller...
* /pick_and_place/twist_controller/frame_id: tool0_controller
* /pick_and_place/twist_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/twist_controller/publish_rate: 500
* /pick_and_place/twist_controller/type: ros_controllers_c...
* /pick_and_place/ur_hardware_interface/headless_mode: False
* /pick_and_place/ur_hardware_interface/input_recipe_file: /home/cheungy/cat...
* /pick_and_place/ur_hardware_interface/joints: ['shoulder_pan_jo...
* /pick_and_place/ur_hardware_interface/kinematics/forearm/pitch: 0
* /pick_and_place/ur_hardware_interface/kinematics/forearm/roll: 0
* /pick_and_place/ur_hardware_interface/kinematics/forearm/x: -0.425
* /pick_and_place/ur_hardware_interface/kinematics/forearm/y: 0
* /pick_and_place/ur_hardware_interface/kinematics/forearm/yaw: 0
* /pick_and_place/ur_hardware_interface/kinematics/forearm/z: 0
* /pick_and_place/ur_hardware_interface/kinematics/hash: calib_12788084448...
* /pick_and_place/ur_hardware_interface/kinematics/shoulder/pitch: 0
* /pick_and_place/ur_hardware_interface/kinematics/shoulder/roll: 0
* /pick_and_place/ur_hardware_interface/kinematics/shoulder/x: 0
* /pick_and_place/ur_hardware_interface/kinematics/shoulder/y: 0
* /pick_and_place/ur_hardware_interface/kinematics/shoulder/yaw: 0
* /pick_and_place/ur_hardware_interface/kinematics/shoulder/z: 0.1625
* /pick_and_place/ur_hardware_interface/kinematics/upper_arm/pitch: 0
* /pick_and_place/ur_hardware_interface/kinematics/upper_arm/roll: 1.570796327
* /pick_and_place/ur_hardware_interface/kinematics/upper_arm/x: 0
* /pick_and_place/ur_hardware_interface/kinematics/upper_arm/y: 0
* /pick_and_place/ur_hardware_interface/kinematics/upper_arm/yaw: 0
* /pick_and_place/ur_hardware_interface/kinematics/upper_arm/z: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_1/pitch: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_1/roll: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_1/x: -0.3922
* /pick_and_place/ur_hardware_interface/kinematics/wrist_1/y: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_1/yaw: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_1/z: 0.1333
* /pick_and_place/ur_hardware_interface/kinematics/wrist_2/pitch: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_2/roll: 1.570796327
* /pick_and_place/ur_hardware_interface/kinematics/wrist_2/x: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_2/y: -0.0997
* /pick_and_place/ur_hardware_interface/kinematics/wrist_2/yaw: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_2/z: -2.0448811823e-11
* /pick_and_place/ur_hardware_interface/kinematics/wrist_3/pitch: 3.14159265359
* /pick_and_place/ur_hardware_interface/kinematics/wrist_3/roll: 1.57079632659
* /pick_and_place/ur_hardware_interface/kinematics/wrist_3/x: 0
* /pick_and_place/ur_hardware_interface/kinematics/wrist_3/y: 0.0996
* /pick_and_place/ur_hardware_interface/kinematics/wrist_3/yaw: 3.14159265359
* /pick_and_place/ur_hardware_interface/kinematics/wrist_3/z: -2.04283014801e-11
* /pick_and_place/ur_hardware_interface/output_recipe_file: /home/cheungy/cat...
* /pick_and_place/ur_hardware_interface/reverse_ip:
* /pick_and_place/ur_hardware_interface/reverse_port: 50007
* /pick_and_place/ur_hardware_interface/robot_ip: 192.168.1.25
* /pick_and_place/ur_hardware_interface/script_command_port: 50004
* /pick_and_place/ur_hardware_interface/script_file: /opt/ros/melodic/...
* /pick_and_place/ur_hardware_interface/script_sender_port: 50008
* /pick_and_place/ur_hardware_interface/servoj_gain: 2000
* /pick_and_place/ur_hardware_interface/servoj_lookahead_time: 0.03
* /pick_and_place/ur_hardware_interface/tf_prefix: pickAndPlace_
* /pick_and_place/ur_hardware_interface/tool_baud_rate: 115200
* /pick_and_place/ur_hardware_interface/tool_parity: 0
* /pick_and_place/ur_hardware_interface/tool_rx_idle_chars: 1.5
* /pick_and_place/ur_hardware_interface/tool_stop_bits: 1
* /pick_and_place/ur_hardware_interface/tool_tx_idle_chars: 3.5
* /pick_and_place/ur_hardware_interface/tool_voltage: 0
* /pick_and_place/ur_hardware_interface/trajectory_port: 50003
* /pick_and_place/ur_hardware_interface/use_tool_communication: False
* /pick_and_place/vel_joint_traj_controller/action_monitor_rate: 20
* /pick_and_place/vel_joint_traj_controller/constraints/elbow_joint/goal: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/elbow_joint/trajectory: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/goal_time: 0.6
* /pick_and_place/vel_joint_traj_controller/constraints/shoulder_lift_joint/goal: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/shoulder_lift_joint/trajectory: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/shoulder_pan_joint/goal: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/shoulder_pan_joint/trajectory: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/stopped_velocity_tolerance: 0.05
* /pick_and_place/vel_joint_traj_controller/constraints/wrist_1_joint/goal: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/wrist_1_joint/trajectory: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/wrist_2_joint/goal: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/wrist_2_joint/trajectory: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/wrist_3_joint/goal: 0.1
* /pick_and_place/vel_joint_traj_controller/constraints/wrist_3_joint/trajectory: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/elbow_joint/d: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/elbow_joint/i: 0.05
* /pick_and_place/vel_joint_traj_controller/gains/elbow_joint/i_clamp: 1
* /pick_and_place/vel_joint_traj_controller/gains/elbow_joint/p: 5.0
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_lift_joint/d: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_lift_joint/i: 0.05
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_lift_joint/i_clamp: 1
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_lift_joint/p: 5.0
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_pan_joint/d: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_pan_joint/i: 0.05
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_pan_joint/i_clamp: 1
* /pick_and_place/vel_joint_traj_controller/gains/shoulder_pan_joint/p: 5.0
* /pick_and_place/vel_joint_traj_controller/gains/wrist_1_joint/d: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/wrist_1_joint/i: 0.05
* /pick_and_place/vel_joint_traj_controller/gains/wrist_1_joint/i_clamp: 1
* /pick_and_place/vel_joint_traj_controller/gains/wrist_1_joint/p: 5.0
* /pick_and_place/vel_joint_traj_controller/gains/wrist_2_joint/d: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/wrist_2_joint/i: 0.05
* /pick_and_place/vel_joint_traj_controller/gains/wrist_2_joint/i_clamp: 1
* /pick_and_place/vel_joint_traj_controller/gains/wrist_2_joint/p: 5.0
* /pick_and_place/vel_joint_traj_controller/gains/wrist_3_joint/d: 0.1
* /pick_and_place/vel_joint_traj_controller/gains/wrist_3_joint/i: 0.05
* /pick_and_place/vel_joint_traj_controller/gains/wrist_3_joint/i_clamp: 1
* /pick_and_place/vel_joint_traj_controller/gains/wrist_3_joint/p: 5.0
* /pick_and_place/vel_joint_traj_controller/joints: ['shoulder_pan_jo...
* /pick_and_place/vel_joint_traj_controller/state_publish_rate: 500
* /pick_and_place/vel_joint_traj_controller/stop_trajectory_duration: 0.5
* /pick_and_place/vel_joint_traj_controller/type: velocity_controll...
* /pick_and_place/vel_joint_traj_controller/velocity_ff/elbow_joint: 1.0
* /pick_and_place/vel_joint_traj_controller/velocity_ff/shoulder_lift_joint: 1.0
* /pick_and_place/vel_joint_traj_controller/velocity_ff/shoulder_pan_joint: 1.0
* /pick_and_place/vel_joint_traj_controller/velocity_ff/wrist_1_joint: 1.0
* /pick_and_place/vel_joint_traj_controller/velocity_ff/wrist_2_joint: 1.0
* /pick_and_place/vel_joint_traj_controller/velocity_ff/wrist_3_joint: 1.0
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/dispense_robot/
controller_stopper (controller_stopper/node)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
ros_control_controller_spawner (controller_manager/spawner)
ros_control_stopped_spawner (controller_manager/spawner)
ur_hardware_interface (ur_robot_driver/ur_robot_driver_node)
/dispense_robot/ur_hardware_interface/
ur_robot_state_helper (ur_robot_driver/robot_state_helper)
/pick_and_place/
controller_stopper (controller_stopper/node)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
ros_control_controller_spawner (controller_manager/spawner)
ros_control_stopped_spawner (controller_manager/spawner)
ur_hardware_interface (ur_robot_driver/ur_robot_driver_node)
/pick_and_place/ur_hardware_interface/
ur_robot_state_helper (ur_robot_driver/robot_state_helper)
auto-starting new master
process[master]: started with pid [9392]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 42d286a2-bf4a-11ed-9755-080027486f66
process[rosout-1]: started with pid [9403]
started core service [/rosout]
process[pick_and_place/robot_state_publisher-2]: started with pid [9410]
process[pick_and_place/ur_hardware_interface-3]: started with pid [9411]
process[pick_and_place/ros_control_controller_spawner-4]: started with pid [9412]
process[pick_and_place/ros_control_stopped_spawner-5]: started with pid [9413]
process[pick_and_place/controller_stopper-6]: started with pid [9415]
process[pick_and_place/ur_hardware_interface/ur_robot_state_helper-7]: started with pid [9424]
[ INFO] [1678456121.756467209]: Initializing dashboard client
process[dispense_robot/robot_state_publisher-8]: started with pid [9429]
[ INFO] [1678456121.780162288]: Waiting for controller manager service to come up on /pick_and_place/controller_manager/switch_controller
[ INFO] [1678456121.781007513]: Connected: Universal Robots Dashboard Server
process[dispense_robot/ur_hardware_interface-9]: started with pid [9431]
[ INFO] [1678456121.794646977]: waitForService: Service [/pick_and_place/controller_manager/switch_controller] has not been advertised, waiting...
process[dispense_robot/ros_control_controller_spawner-10]: started with pid [9440]
[ INFO] [1678456121.834555156]: Initializing urdriver
process[dispense_robot/ros_control_stopped_spawner-11]: started with pid [9442]
[ WARN] [1678456121.848844960]: No realtime capabilities found. Consider using a realtime system for better performance
[ INFO] [1678456121.852820835]: Negotiated RTDE protocol version to 2.
[ INFO] [1678456121.854626841]: Setting up RTDE communication with frequency 500.000000
[ INFO] [1678456121.873309131]: Checking if calibration data matches connected robot.
process[dispense_robot/controller_stopper-12]: started with pid [9448]
[ WARN] [1678456121.894112498]: No realtime capabilities found. Consider using a realtime system for better performance
process[dispense_robot/ur_hardware_interface/ur_robot_state_helper-13]: started with pid [9464]
[ INFO] [1678456121.940057596]: Initializing dashboard client
[ INFO] [1678456121.944918019]: Connected: Universal Robots Dashboard Server
[ INFO] [1678456121.959523495]: Waiting for controller manager service to come up on /dispense_robot/controller_manager/switch_controller
[ INFO] [1678456121.965843515]: waitForService: Service [/dispense_robot/controller_manager/switch_controller] has not been advertised, waiting...
[ INFO] [1678456122.003501805]: Initializing urdriver
[ WARN] [1678456122.013709956]: No realtime capabilities found. Consider using a realtime system for better performance
[ INFO] [1678456122.427496050]: Negotiated RTDE protocol version to 2.
[ INFO] [1678456122.428846302]: Setting up RTDE communication with frequency 500.000000
[ERROR] [1678456122.952935513]: The calibration parameters of the connected robot don't match the ones from the given kinematics config file. Please be aware that this can lead to critical inaccuracies of tcp positions. Use the ur_calibration tool to extract the correct calibration from the robot and pass that into the description. See [https://github.com/UniversalRobots/Universal_Robots_ROS_Driver#extract-calibration-information] for details.
[ WARN] [1678456122.973051491]: No realtime capabilities found. Consider using a realtime system for better performance
[ INFO] [1678456122.973617372]: Loaded ur_robot_driver hardware_interface
[ INFO] [1678456123.087613137]: Robot's safety mode is now NORMAL
[ INFO] [1678456123.088499799]: Robot mode is now POWER_OFF
[ INFO] [1678456123.089817430]: waitForService: Service [/pick_and_place/controller_manager/switch_controller] is now available.
[ INFO] [1678456123.090005222]: Service available.
[ INFO] [1678456123.090138161]: Waiting for controller list service to come up on /pick_and_place/controller_manager/list_controllers
[ INFO] [1678456123.090701297]: Service available.
[INFO] [1678456123.307370]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1678456123.309352]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1678456123.310867]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1678456123.312624]: Loading controller: pos_joint_traj_controller
[INFO] [1678456123.317792]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1678456123.341412]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1678456123.347062]: Controller Spawner: Waiting for service controller_manager/unload_controller
[ERROR] [1678456123.348817461]: Could not find joint 'shoulder_pan_joint' in URDF model.
[ERROR] [1678456123.349315776]: Failed to initialize the controller
[ERROR] [1678456123.349438295]: Initializing controller 'pos_joint_traj_controller' failed
[INFO] [1678456123.353938]: Loading controller: joint_state_controller
[INFO] [1678456123.363646]: Loading controller: scaled_pos_joint_traj_controller
[INFO] [1678456123.377477]: Controller Spawner: Waiting for service controller_manager/load_controller
[ERROR] [1678456123.396148538]: Could not find joint 'shoulder_pan_joint' in URDF model.
[INFO] [1678456123.399790]: Controller Spawner: Waiting for service controller_manager/load_controller
[ERROR] [1678456123.402609122]: Failed to initialize the controller
[ERROR] [1678456123.402749836]: Initializing controller 'scaled_pos_joint_traj_controller' failed
terminate called after throwing an instance of 'std::system_error'
what(): Failed to bind socket for port 50003 to address. Reason: Address already in use: Address already in use
================================================================================REQUIRED process [dispense_robot/ur_hardware_interface-9] has died!
process has died [pid 9431, exit code -6, cmd /home/cheungy/catkin_ws/devel/lib/ur_robot_driver/ur_robot_driver_node __name:=ur_hardware_interface __log:=/home/cheungy/.ros/log/42d286a2-bf4a-11ed-9755-080027486f66/dispense_robot-ur_hardware_interface-9.log].
log file: /home/cheungy/.ros/log/42d286a2-bf4a-11ed-9755-080027486f66/dispense_robot-ur_hardware_interface-9*.log
Initiating shutdown!
================================================================================
[dispense_robot/ur_hardware_interface/ur_robot_state_helper-13] killing on exit
[dispense_robot/controller_stopper-12] killing on exit
[dispense_robot/ros_control_stopped_spawner-11] killing on exit
[dispense_robot/ros_control_controller_spawner-10] killing on exit
[dispense_robot/ur_hardware_interface-9] killing on exit
[dispense_robot/robot_state_publisher-8] killing on exit
[pick_and_place/ur_hardware_interface/ur_robot_state_helper-7] killing on exit
[pick_and_place/controller_stopper-6] killing on exit
[pick_and_place/ros_control_stopped_spawner-5] killing on exit
[INFO] [1678456123.814071]: Shutting down spawner. Stopping and unloading controllers...
[INFO] [1678456123.815348]: Stopping all controllers...
[pick_and_place/ros_control_controller_spawner-4] killing on exit
[INFO] [1678456123.827603]: Shutting down spawner. Stopping and unloading controllers...
[INFO] [1678456123.828774]: Stopping all controllers...
[INFO] [1678456123.831245]: Unloading all loaded controllers...
[pick_and_place/ur_hardware_interface-3] killing on exit
Interrupt signal (2) received.
[ERROR] [1678456123.848318113]: Could not stop controller 'joint_state_controller' since it is not running
[INFO] [1678456123.848664]: Unloading all loaded controllers...
[INFO] [1678456123.849885]: Trying to unload joint_state_controller
[WARN] [1678456123.897281]: Controller Spawner couldn't find the expected controller_manager ROS interface.
[pick_and_place/robot_state_publisher-2] killing on exit
[ERROR] [1678456124.003309]: Failed to load pos_joint_traj_controller
[INFO] [1678456124.004555]: Loading controller: joint_group_vel_controller
Traceback (most recent call last):
File "/opt/ros/melodic/lib/controller_manager/spawner", line 212, in <module>
if __name__ == '__main__': main()
File "/opt/ros/melodic/lib/controller_manager/spawner", line 190, in main
resp = load_controller(name)
File "/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 442, in __call__
return self.call(*args, **kwds)
File "/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 525, in call
raise ServiceException("service [%s] returned no response"%self.resolved_name)
rospy.service.ServiceException: service [/pick_and_place/controller_manager/load_controller] returned no response
[WARN] [1678456124.398996]: Controller Spawner couldn't find the expected controller_manager ROS interface.
[WARN] [1678456125.943233]: Controller Spawner error while taking down controllers: transport error completing service call: unable to receive data from sender, check sender's logs for details
[ERROR] [1678456126.082692]: Failed to load scaled_pos_joint_traj_controller
[INFO] [1678456126.084107]: Loading controller: speed_scaling_state_controller
Traceback (most recent call last):
File "/opt/ros/melodic/lib/controller_manager/spawner", line 212, in <module>
if __name__ == '__main__': main()
File "/opt/ros/melodic/lib/controller_manager/spawner", line 190, in main
resp = load_controller(name)
File "/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 442, in __call__
return self.call(*args, **kwds)
File "/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 512, in call
raise ServiceException("unable to connect to service: %s"%e)
rospy.service.ServiceException: unable to connect to service: [Errno 111] Connection refused
[dispense_robot/controller_stopper-12] escalating to SIGTERM
[pick_and_place/controller_stopper-6] escalating to SIGTERM
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
Hello @RishiM ,
I have a couple of questions.
Did I understood correctly you are running this with real robots, or is this in simulation?
Cheers,
Roberto
RishiM
March 13, 2023, 11:51am
7
Dear Roberto,
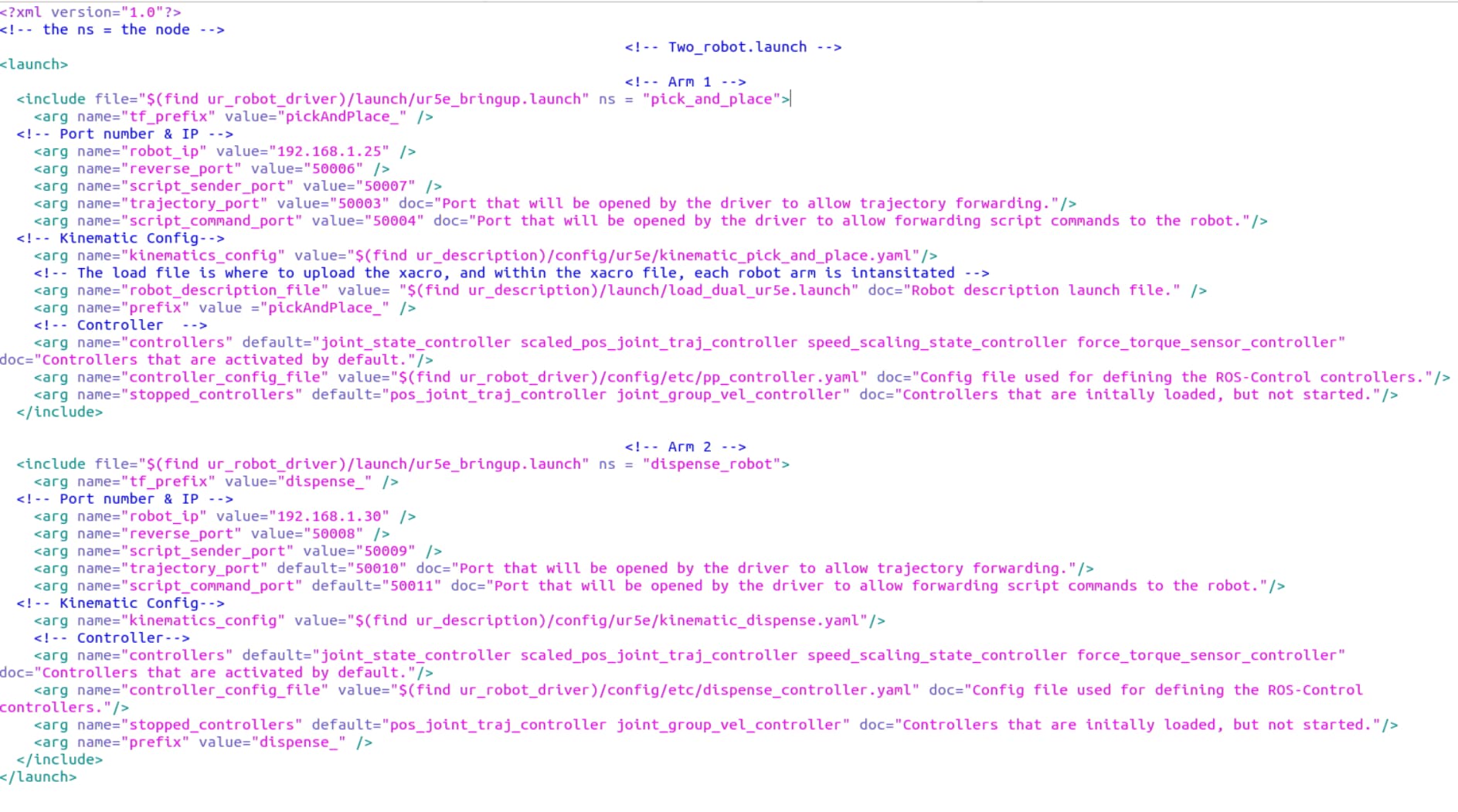
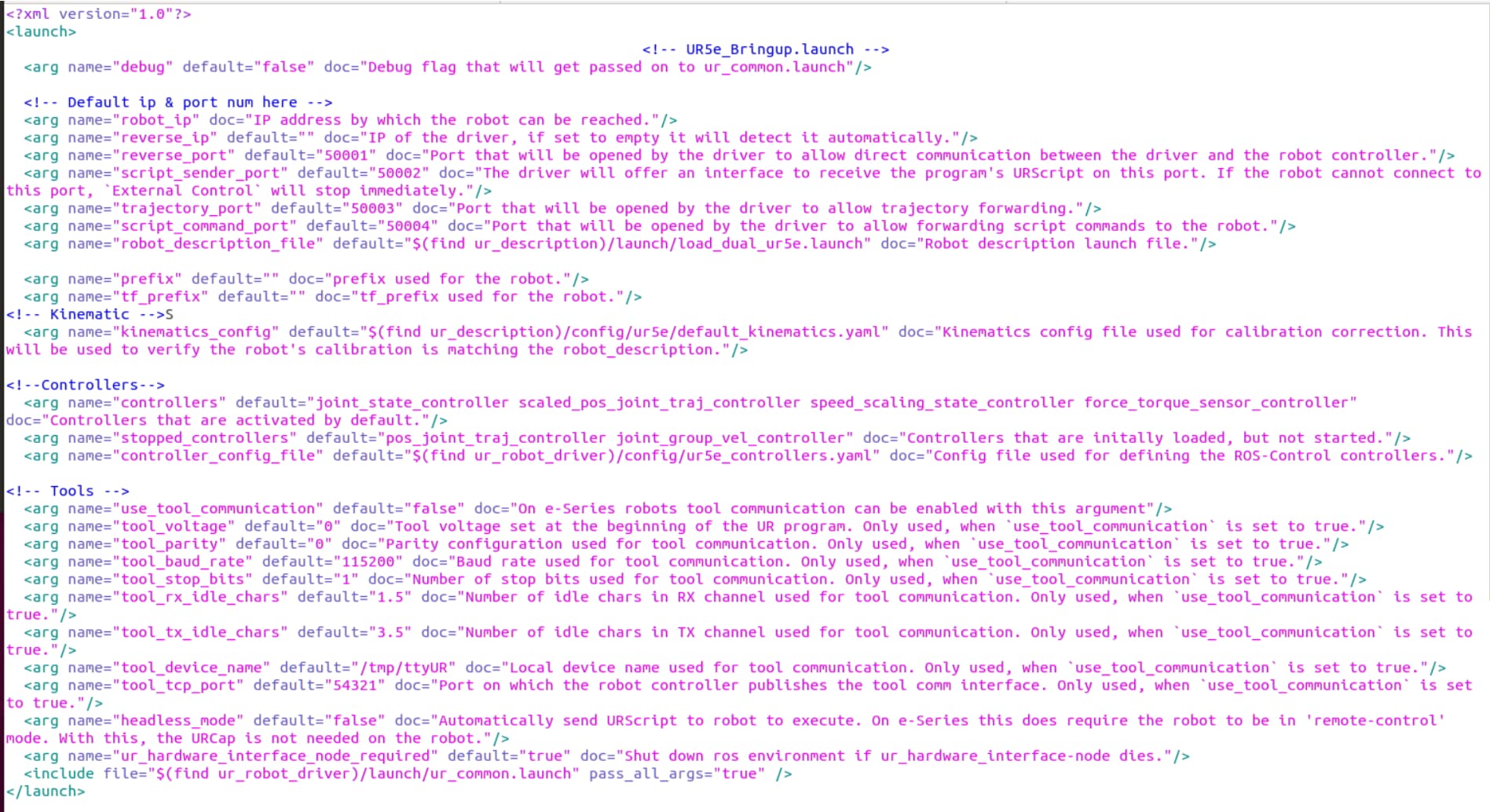
Thank you for your reply! As I can only embed 1 media per post, I will try to upload them one by one! I have 5 launch files
The launch files I have:
RishiM
March 13, 2023, 11:53am
10
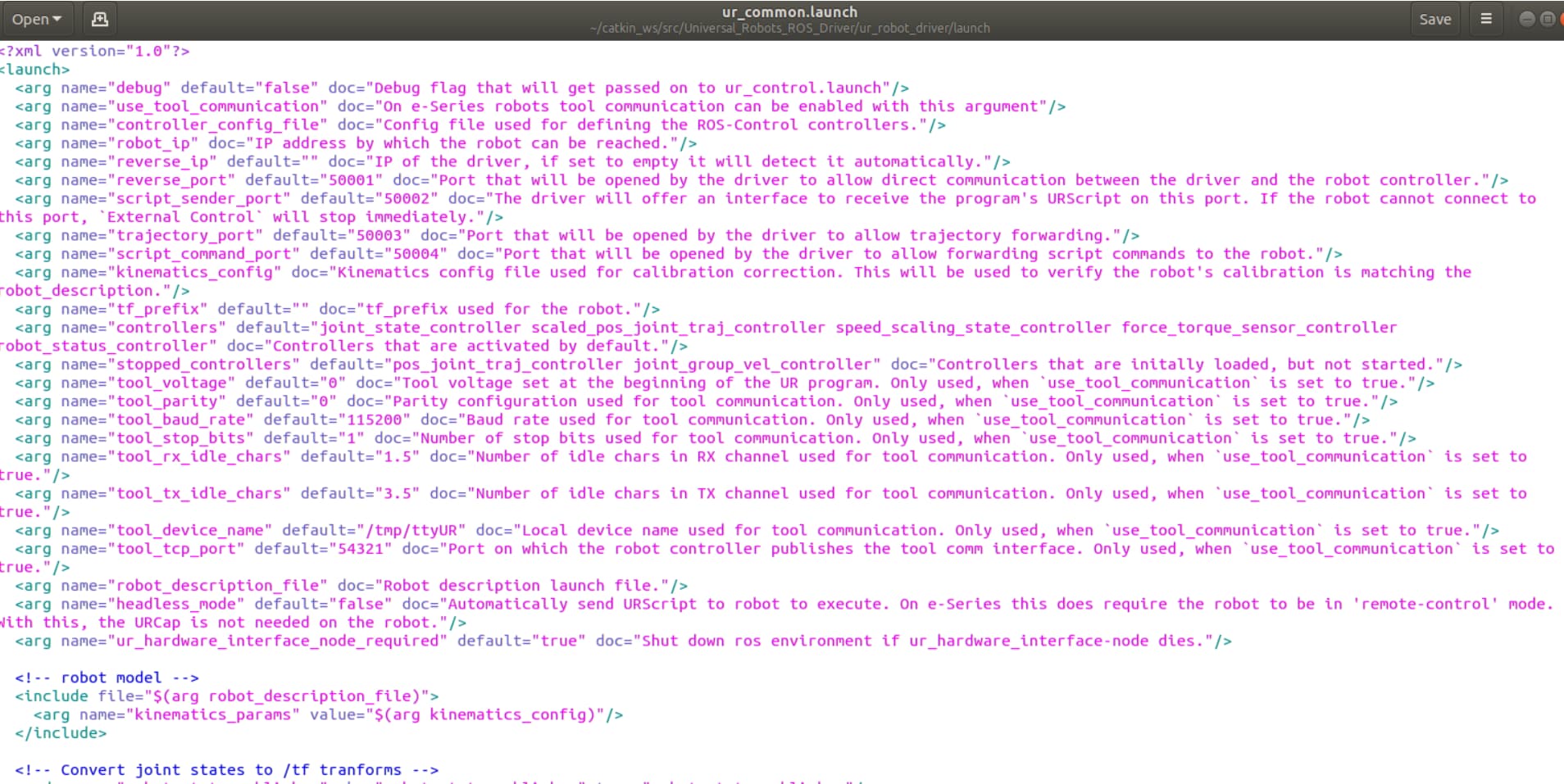
ur_common.launch (to be continued)
RishiM
March 13, 2023, 11:55am
12
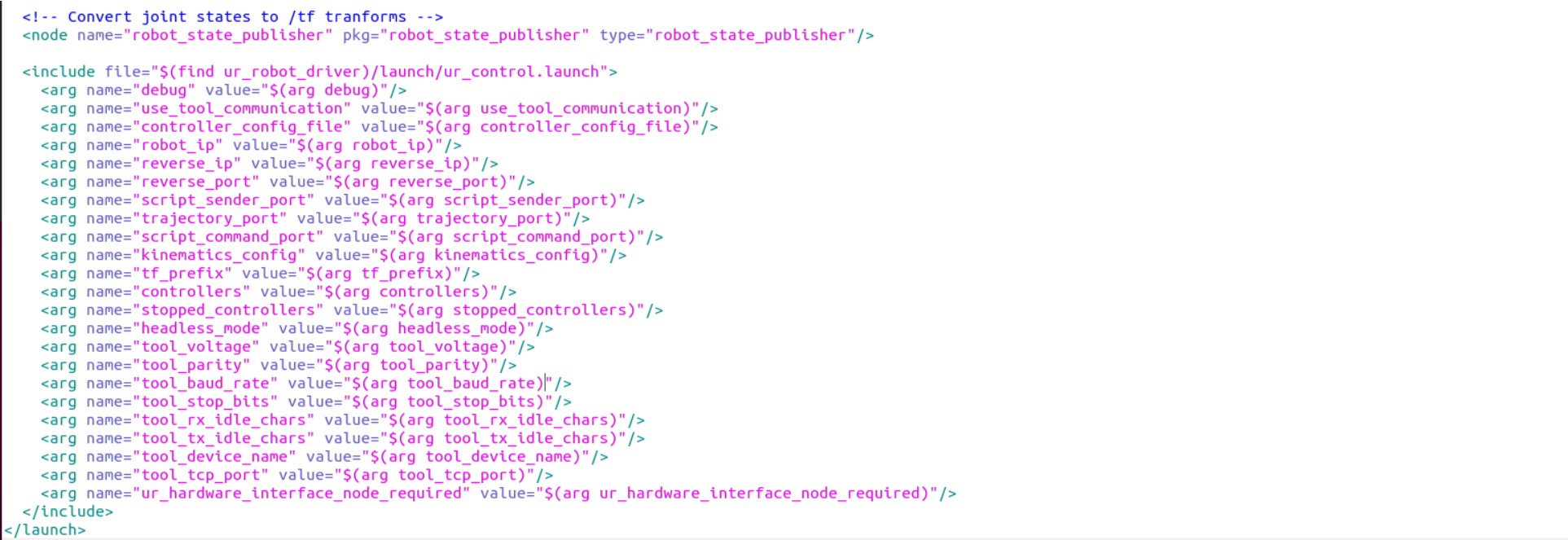
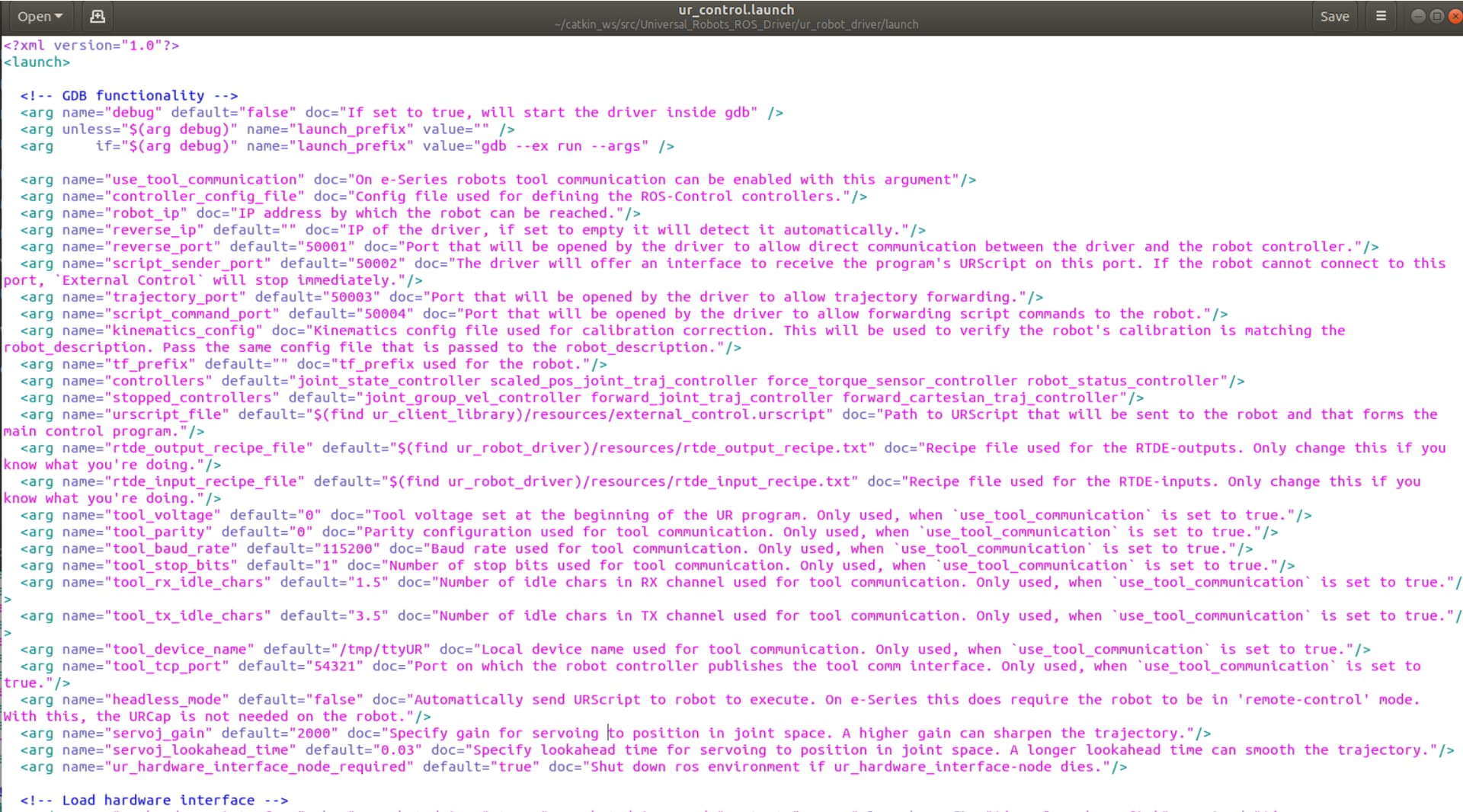
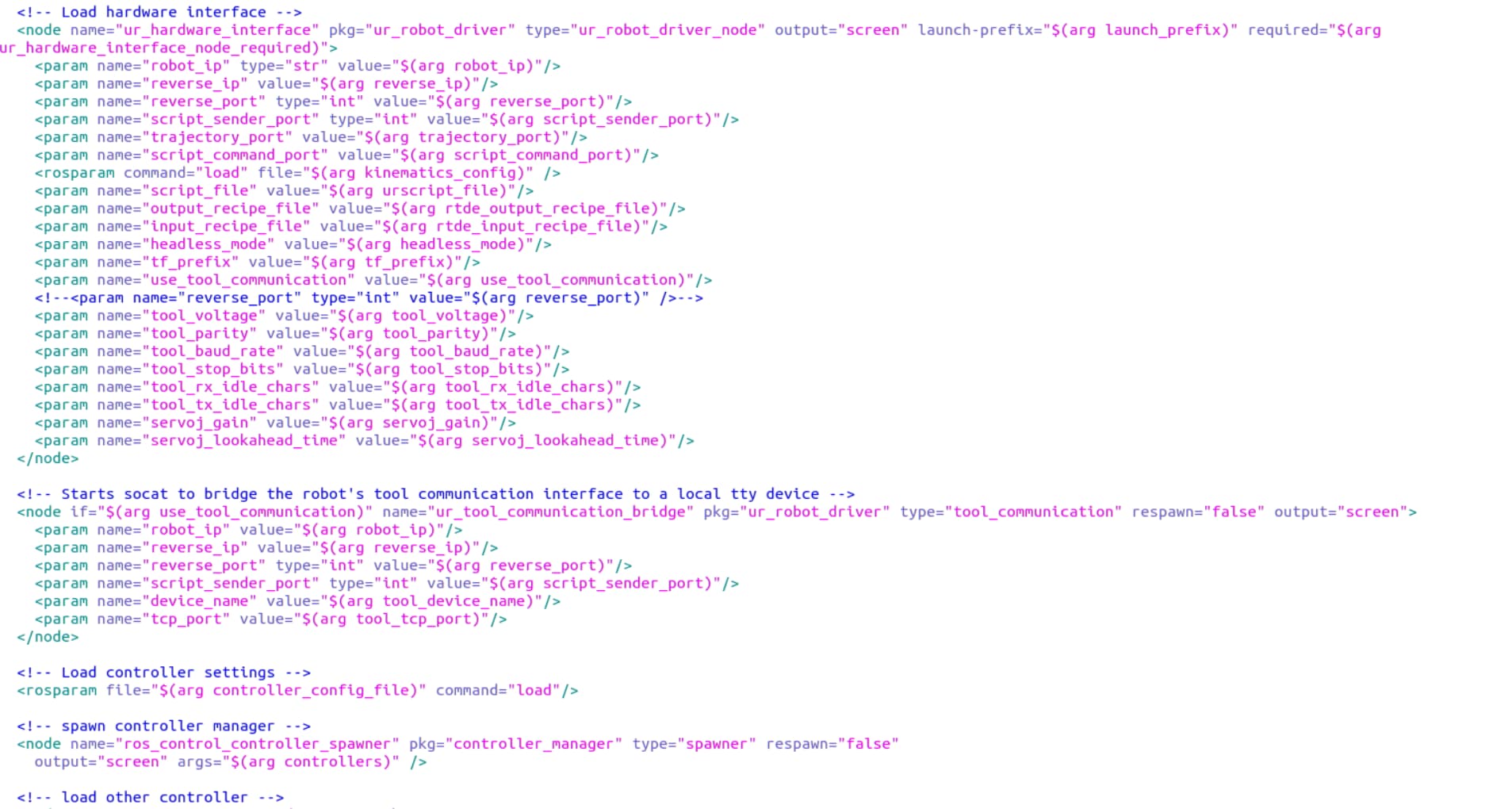
ur_control.launch (to be continued)
RishiM
March 13, 2023, 11:56am
13
For robot description:
system
March 17, 2023, 2:44pm
17
This topic was automatically closed after 7 days. New replies are no longer allowed.