Hey everyone!
I was following the MoveIt Camp tutorial and in the 3rd video at the last step 13:45 when I run the roslaunch sawyer_moveit_config my_connect.launch command I get the following error:
(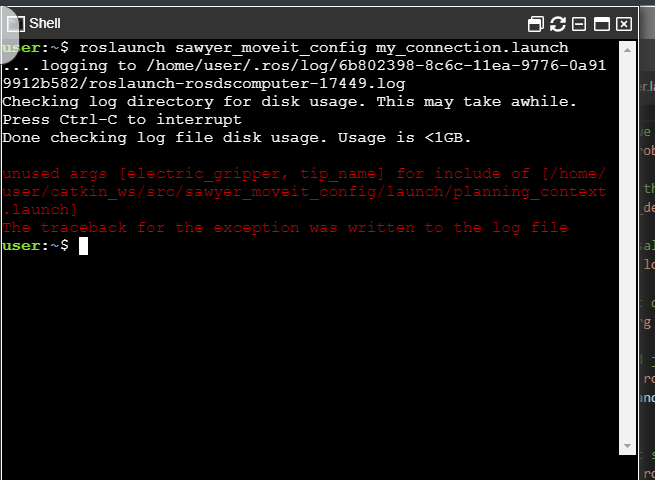
I tried parsing those 2 but I still get the same error so I must not do it properly, if someone could help me fix the error I would really appreciate it!
Best,
Razvan.