wai.mak
September 28, 2021, 11:08am
21
Sure @albertoezquerro ,
here it is ,
ubuntu@ubuntu:~$ rostopic list
also rosnode list below:
ubuntu@ubuntu:~$ rosnode list
So what are the topics for controlling the arm of the robot? I cannot identify them on the list. Also, which type of controller are you using?
In the ros_controllers.yaml configuration file you are trying to connect to a FollowJointTrajectory controller named arm_controller which doesn’t seem to exist.
wai.mak
September 30, 2021, 9:16am
23
@albertoezquerro , thanks good question …, I’m not sure actually, now you pointed that out…yea it is missing the topic to control the robot arm…,
and yes in the moveit package, the controller it tries to use is the arm_controller topic,
now my question is, should this topic (arm_controller) be spawned by the moveit package when I launch it?
or should this arm_controller topic be spawned when I fire up this robot itself?
It has to be started by the robot, MoveIt only connects to it. Check this: Low Level Controllers — moveit_tutorials Noetic documentation
wai.mak
September 30, 2021, 1:17pm
25
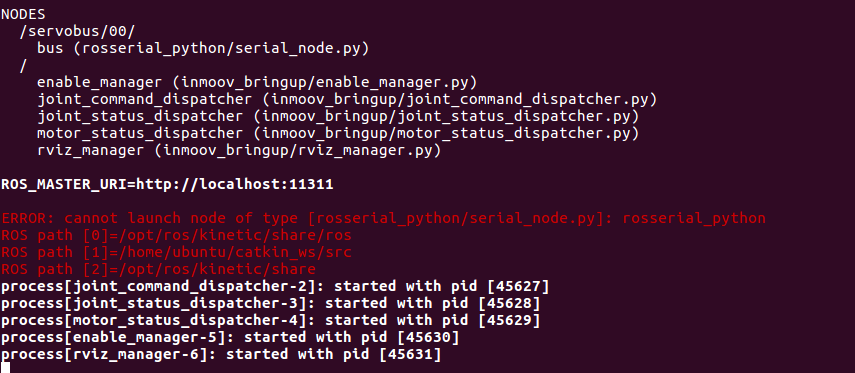
@albertoezquerro , ok I ran my robot by: roslaunch inmoov_bringup bringup.launch
and then I saw this error rosserial_python error…, please advice?
This is the code in the bringup.launch file:
And I did a rostopic list and I dont seem to see any arm_controller topic , please advice on what I can do from here?
ubuntu@ubuntu:~$ rostopic list
@albertoezquerro …I’m still waiting for replies…,
is there a subject or course that teaches you on how to build a robot arm controller from scratch?? using hobby rc servos as a minimum…,
wai.mak
October 8, 2021, 11:29am
27
@albertoezquerro any updates on this ??
Hello @wai.mak ,
No, there’s no such course (at least that I’m aware of), unfortunately. You should have a look at the ROS Control course though (especially units 5 and 6) to better understand how this works.