hello I am georgios giant study robotics 3 year now in london so i am doing a project and i watch the video about moving the robot by ros but i have question about it
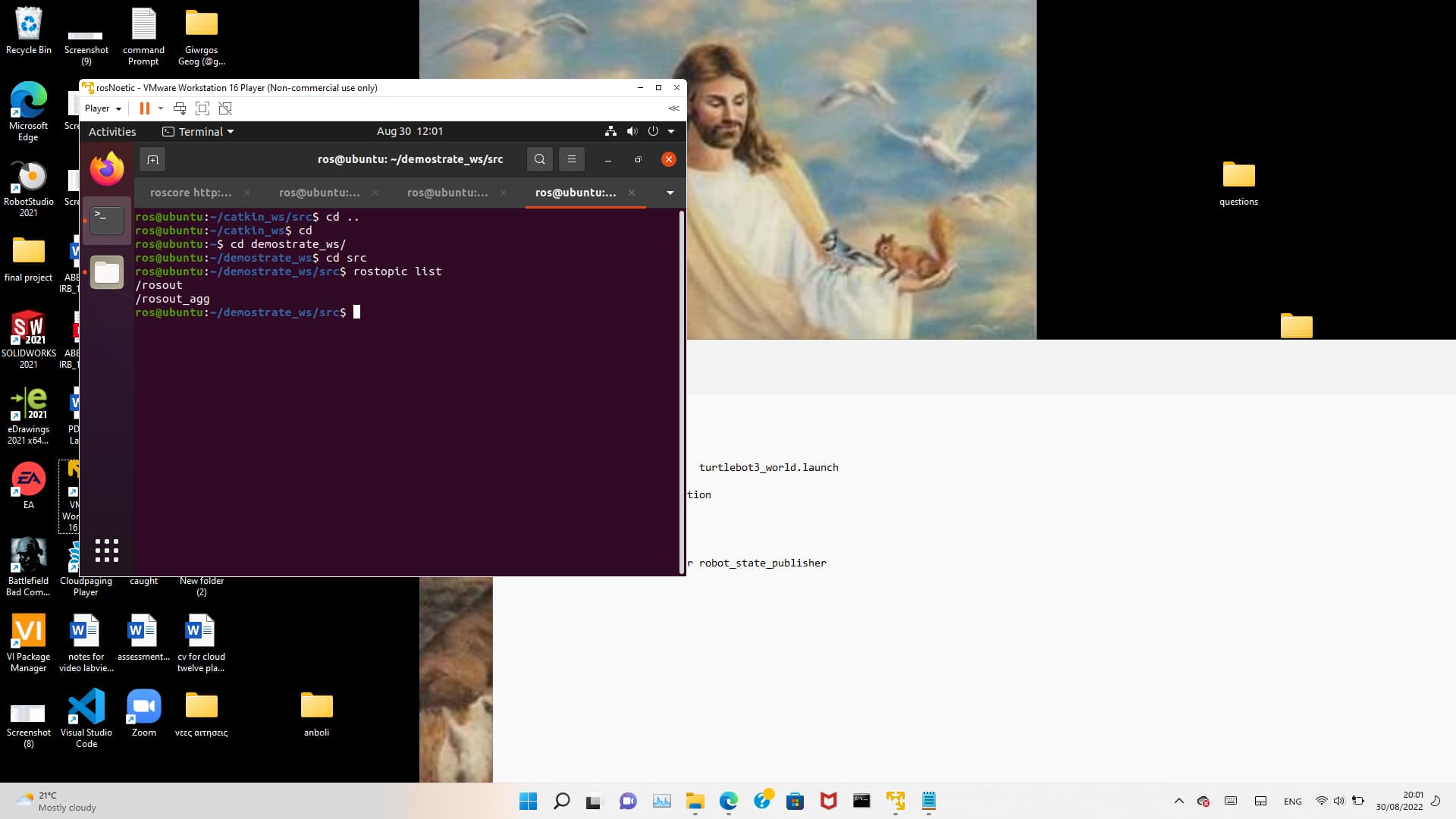
if you can help me with some question so first when i try to type rostopic list it is not give me full list only a option of /rosout and /rosout_agg like it show in the picture below what is the problem what is missing ?
In your particular case I can see that there is no simulation running. So you should start first a Gazebo simulation and have a robot in the environment that subscribes to the topic /cmd_vel. So as a requisite cmd_vel must show up when you run the rostopic list command.
About the videos, we do YouTube videos and Live Classes every week explaining different ROS/robotics concepts. We also turn many of them into blog posts, which some may find easier to follow along or reproduce.
The related post for that video is here:
If you are new to Python you might want to first do the free Python course on our academy.
And if you are just starting with ROS, I suggest you keep going with the ROS Basics in Five Day Course (Python).