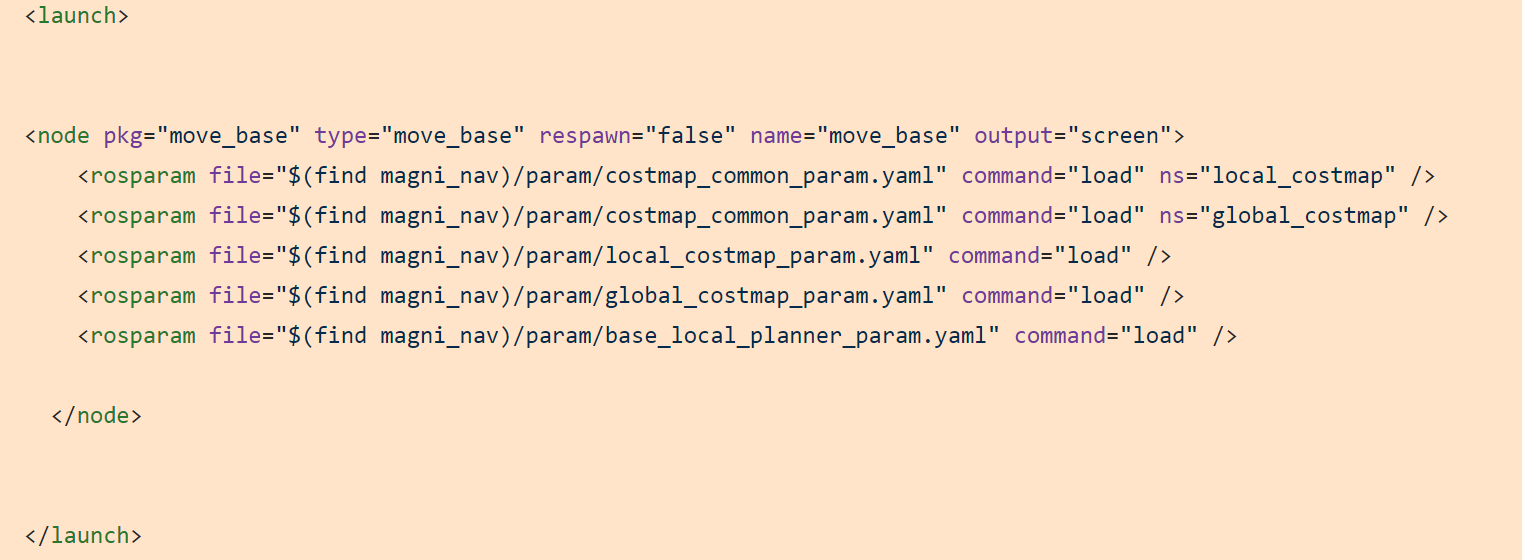
I’m trying to run move_base with a set of params for base local planner param, common costmap param, global cost map param and local cost map param and I’m facing the errors below, keeps popping up… :
Waiting on transform from /base_footprint to /map to become available before running costmap, tf error: [closed]
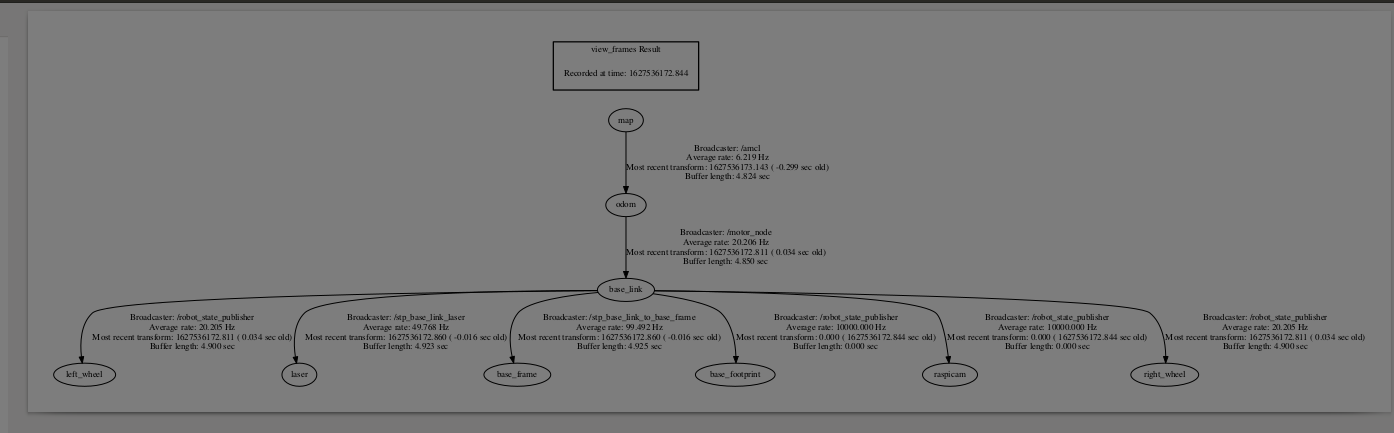
What do you mean by real-life mode? Well, the problem is with your transform tree, there’s no connection from the map frame to the base_footprint frame, so you should start debugging from there.
Make sure that the map frame is being published, make sure that the amcl node is publishing the transform from map frame to odom frame…
and it seems transform map frame is to odom frame to base link frame to base_foot print…
And now at the moment, my bot’s move base does not have much path planning and obstacles capabilities so I’m trying to use the Turtlebot’s navigation move base …but I ran into a lot of issues,
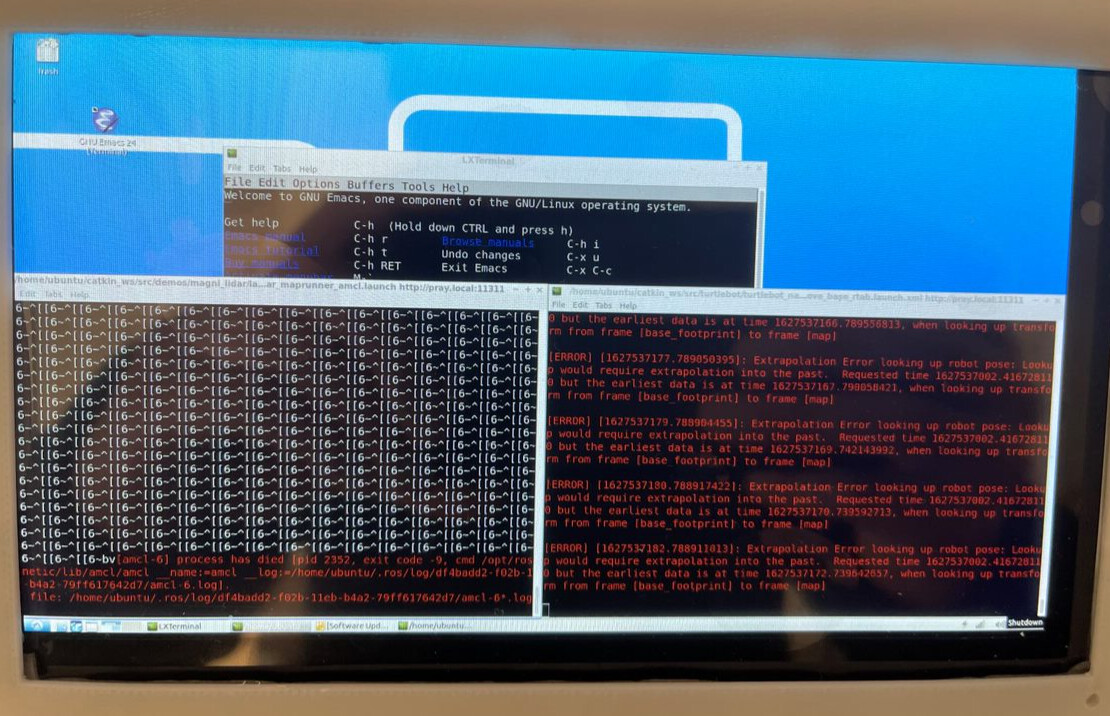
so after I made sure that the amcl node is publishing transform from map to odom frame as you guided…, and then I went ahead to launch the turtlebot move base and I got these errors below straight away and my RPI just frozen…, the only thing I changed in there is the cost map common param yaml, for the laser_scan_sensor’s sensor frame to base_link_laser (which is my bot’s one…) and not sure what else I need to be aware of? to work with my bot…,
It seemed to killed the ACML process node …, is there something wrong in my transform tree? Please advice, thank you,