Yes, there are a few errors and warnings, but I don’t know how to solve them.
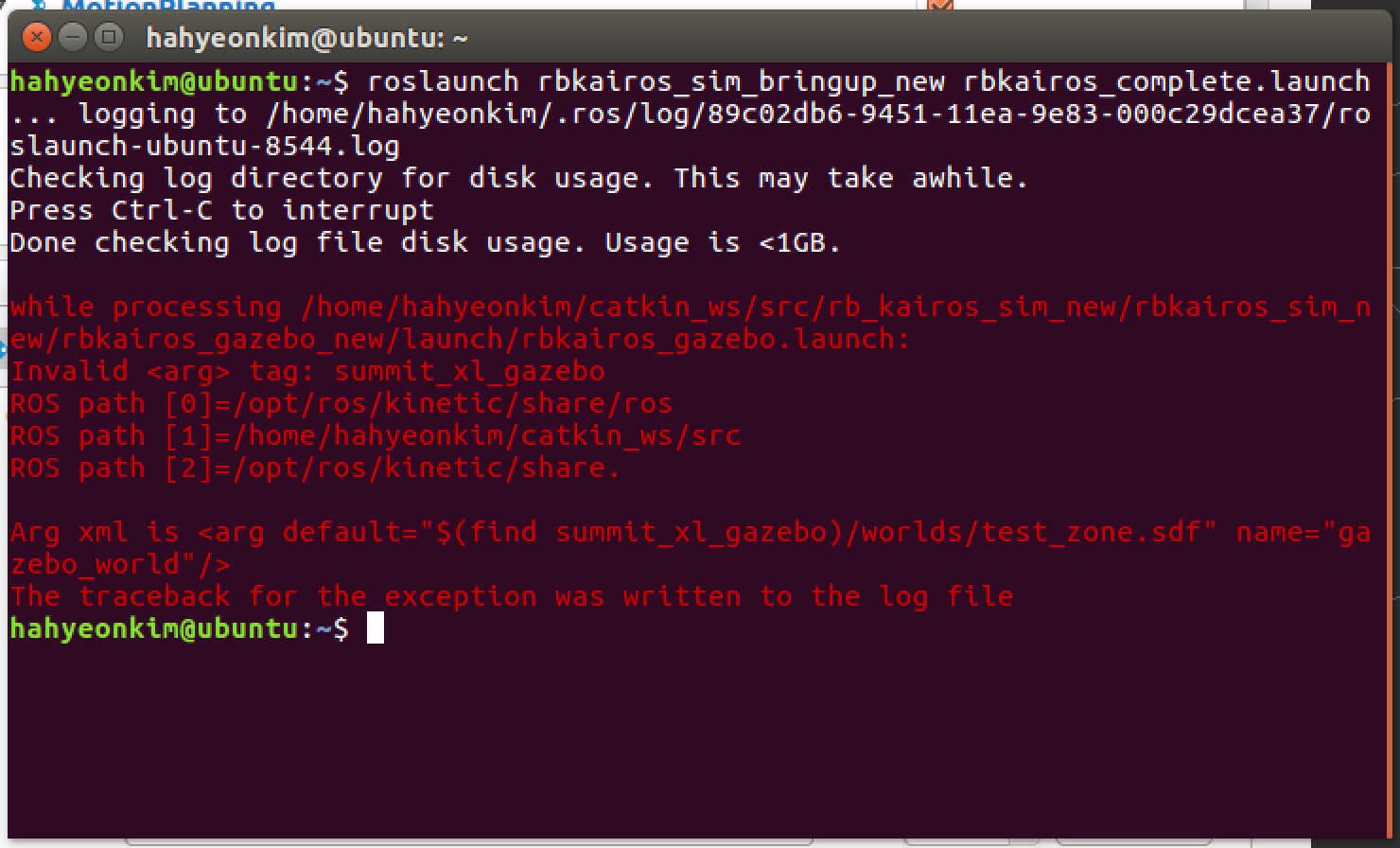
This is the output when I type “roslaunch rbkairos_sim_bringup_new rbkairos_complete.launch”:
… logging to /home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/roslaunch-david-pc-27411.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
deprecated: xacro tags should be prepended with ‘xacro’ xml namespace.
Use the following script to fix incorrect usage:
find . -iname “*.xacro” | xargs sed -i ‘s#<([/]?)(if|unless|include|arg|property|macro|insert_block)#<\1xacro:\2#g’
when processing file: /home/david/catkin_ws/src/rbkairos_common_new/rbkairos_description_new/robots/versions/rbkairos_ur5_egh.urdf.xacro
started roslaunch server http://david-pc:40397/
SUMMARY
========
PARAMETERS
-
/robot/arm_controller/action_monitor_rate: 10
-
/robot/arm_controller/constraints/elbow_joint/goal: 0.1
-
/robot/arm_controller/constraints/elbow_joint/trajectory: 0.1
-
/robot/arm_controller/constraints/goal_time: 0.6
-
/robot/arm_controller/constraints/shoulder_lift_joint/goal: 0.1
-
/robot/arm_controller/constraints/shoulder_lift_joint/trajectory: 0.1
-
/robot/arm_controller/constraints/shoulder_pan_joint/goal: 0.1
-
/robot/arm_controller/constraints/shoulder_pan_joint/trajectory: 0.1
-
/robot/arm_controller/constraints/stopped_velocity_tolerance: 0.05
-
/robot/arm_controller/constraints/wrist_1_joint/goal: 0.1
-
/robot/arm_controller/constraints/wrist_1_joint/trajectory: 0.1
-
/robot/arm_controller/constraints/wrist_2_joint/goal: 0.1
-
/robot/arm_controller/constraints/wrist_2_joint/trajectory: 0.1
-
/robot/arm_controller/constraints/wrist_3_joint/goal: 0.1
-
/robot/arm_controller/constraints/wrist_3_joint/trajectory: 0.1
-
/robot/arm_controller/joints: ['robot_arm_shoul…
-
/robot/arm_controller/state_publish_rate: 25
-
/robot/arm_controller/stop_trajectory_duration: 0.5
-
/robot/arm_controller/type: position_controll…
-
/robot/gripper_controller/joint: robot_egh_gripper…
-
/robot/gripper_controller/type: position_controll…
-
/robot/joint_read_state_controller/publish_rate: 100.0
-
/robot/joint_read_state_controller/type: joint_state_contr…
-
/robot/robot_description: <?xml version="1…
-
/robot/twist_mux/locks: [{‘topic’: 'robot…
-
/robot/twist_mux/topics: [{‘topic’: 'pad_t…
-
/rosdistro: kinetic
-
/rosversion: 1.12.17
-
/use_sim_time: True
NODES
/
gazebo (gazebo_ros_new/gzserver)
gazebo_gui (gazebo_ros_new/gzclient)
start_laserscan_multi_merger_kairos (ira_laser_tools/start_rbkairos_laser_merger.sh)
/robot/
controller_spawner (controller_manager/spawner)
controller_spawner_arm (controller_manager/spawner)
controller_spawner_gripper (controller_manager/spawner)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
twist_mux (twist_mux/twist_mux)
urdf_spawner_rbkairos_model (gazebo_ros_new/spawn_model)
ROS_MASTER_URI=http://localhost:11311
process[robot/robot_state_publisher-1]: started with pid [27449]
process[robot/urdf_spawner_rbkairos_model-2]: started with pid [27450]
process[robot/controller_spawner-3]: started with pid [27452]
process[robot/controller_spawner_arm-4]: started with pid [27464]
process[robot/controller_spawner_gripper-5]: started with pid [27471]
process[robot/twist_mux-6]: started with pid [27474]
/home/david/catkin_ws/src/ira_laser_tools/scripts/start_rbkairos_laser_merger.sh: línea 12: /opt/ros/noetic/setup.bash: No existe el archivo o el directorio
process[start_laserscan_multi_merger_kairos-7]: started with pid [27490]
process[gazebo-8]: started with pid [27500]
[start_laserscan_multi_merger_kairos-7] process has died [pid 27490, exit code 1, cmd /home/david/catkin_ws/src/ira_laser_tools/scripts/start_rbkairos_laser_merger.sh __name:=start_laserscan_multi_merger_kairos __log:=/home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/start_laserscan_multi_merger_kairos-7.log].
log file: /home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/start_laserscan_multi_merger_kairos-7*.log
process[gazebo_gui-9]: started with pid [27517]
[INFO] [1624790531.859899, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1624790531.889511, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1624790531.978362, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[ INFO] [1624790531.999236120]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1624790532.004491170]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting…
[ INFO] [1624790532.070177840]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1624790532.070656886]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting…
SpawnModel script started
[INFO] [1624790532.377355, 0.000000]: Loading model XML from ros parameter
[INFO] [1624790532.383994, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[WARN] [1624790562.065201, 0.000000]: Controller Spawner couldn’t find the expected controller_manager ROS interface.
[WARN] [1624790562.092818, 0.000000]: Controller Spawner couldn’t find the expected controller_manager ROS interface.
[WARN] [1624790562.186839, 0.000000]: Controller Spawner couldn’t find the expected controller_manager ROS interface.
[robot/controller_spawner-3] process has finished cleanly
log file: /home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/robot-controller_spawner-3*.log
[robot/controller_spawner_arm-4] process has finished cleanly
log file: /home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/robot-controller_spawner_arm-4*.log
[robot/controller_spawner_gripper-5] process has finished cleanly
log file: /home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/robot-controller_spawner_gripper-5*.log
Error [parser.cc:581] Unable to find uri[model://test_zone]
[ INFO] [1624790609.490145728]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1624790609.490791391]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1624790609.616128679]: Physics dynamic reconfigure ready.
[INFO] [1624790609.619823, 0.000000]: Calling service /gazebo/spawn_urdf_model
[ INFO] [1624790609.645991378]: Physics dynamic reconfigure ready.
Warning [parser_urdf.cc:1232] multiple inconsistent <self_collide> exists due to fixed joint reduction overwriting previous value [true] with [false].
[ INFO] [1624790610.349810820]: Laser Plugin: Using the ‘robotNamespace’ param: ‘/robot/’
[ INFO] [1624790610.349990308]: Starting GazeboRosLaser Plugin (ns = /robot/)
[ INFO] [1624790610.353395077]: GPU Laser Plugin (ns = /robot/) <tf_prefix_>, set to “/robot”
[ INFO] [1624790610.357670816]: LoadThread function completed
[ INFO] [1624790610.396518300]: Camera Plugin: Using the ‘robotNamespace’ param: ‘/robot/’
[ INFO] [1624790610.403170425]: Camera Plugin (ns = /robot/) <tf_prefix_>, set to “/robot”
[ INFO] [1624790610.413338327]: Laser Plugin: Using the ‘robotNamespace’ param: ‘/robot/’
[ INFO] [1624790610.413838798]: Starting GazeboRosLaser Plugin (ns = /robot/)
[ INFO] [1624790610.421140681]: GPU Laser Plugin (ns = /robot/) <tf_prefix_>, set to “/robot”
[ INFO] [1624790610.423111503]: LoadThread function completed
[INFO] [1624790610.459019, 0.000000]: Spawn status: SpawnModel: Successfully spawned entity
[INFO] [1624790610.459490, 0.000000]: Waiting for service /gazebo/set_model_configuration
[INFO] [1624790610.461528, 0.000000]: temporary hack to fix the -J joint position option (issue #93), sleeping for 1 second to avoid race condition.
[ INFO] [1624790610.496394001]: Camera Plugin: Using the ‘robotNamespace’ param: ‘/robot/’
[ INFO] [1624790610.504569793]: Camera Plugin (ns = /robot/) <tf_prefix_>, set to “/robot”
[ INFO] [1624790610.653963769]: Loading gazebo_ros_new_control plugin
[ INFO] [1624790610.654467269]: Starting gazebo_ros_new_control plugin in namespace: /robot/
[ INFO] [1624790610.655621744]: gazebo_ros_new_control plugin is waiting for model URDF in parameter [/robot/robot_description] on the ROS param server.
[ERROR] [1624790610.787282050]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_front_right_wheel_joint
[ERROR] [1624790610.789722575]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_front_left_wheel_joint
[ERROR] [1624790610.791661847]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_back_left_wheel_joint
[ERROR] [1624790610.793525465]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_back_right_wheel_joint
[ERROR] [1624790610.796319080]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_arm_shoulder_pan_joint
[ERROR] [1624790610.799651517]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_arm_shoulder_lift_joint
[ERROR] [1624790610.801826509]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_arm_elbow_joint
[ERROR] [1624790610.804552504]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_arm_wrist_1_joint
[ERROR] [1624790610.806608155]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_arm_wrist_2_joint
[ERROR] [1624790610.808684069]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_arm_wrist_3_joint
[ERROR] [1624790610.810608197]: No p gain specified for pid. Namespace: /gazebo_ros_new_control/pid_gains/robot_egh_gripper_finger_left_joint
[ INFO] [1624790610.828457089]: Loaded gazebo_ros_new_control.
[ INFO] [1624790610.834913863]: PlanarMovePlugin missing , defaults to “1”
[ INFO] [1624790610.834975433]: PlanarMovePlugin missing , defaults to “0”
[ INFO] [1624790610.853106540]: MimicJointPlugin loaded! Joint: “robot_egh_gripper_finger_left_joint”, Mimic joint: “robot_egh_gripper_finger_right_joint”, Multiplier: 1, Offset: 0, MaxEffort: 200, Sensitiveness: 0
[INFO] [1624790611.463091, 0.000000]: Calling service /gazebo/set_model_configuration
[INFO] [1624790611.470048, 0.000000]: Set model configuration status: SetModelConfiguration: success
[ WARN] [1624790611.486332450, 0.001000000]: The default_robot_hw_sim plugin is using the Joint::SetPosition method without preserving the link velocity.
[ WARN] [1624790611.486905785, 0.001000000]: As a result, gravity will not be simulated correctly for your model.
[ WARN] [1624790611.487206135, 0.001000000]: Please set gazebo_pid parameters, switch to the VelocityJointInterface or EffortJointInterface, or upgrade to Gazebo 9.
[ WARN] [1624790611.487506539, 0.001000000]: For details, see https://github.com/ros-simulation/gazebo_ros_new_pkgs_new/issues/612
[ WARN] [1624790611.488444070, 0.001000000]: The mimic_joint plugin is using the Joint::SetPosition method without preserving the link velocity.
[ WARN] [1624790611.488876154, 0.001000000]: As a result, gravity will not be simulated correctly for your model.
[ WARN] [1624790611.489283812, 0.001000000]: Please set gazebo_pid parameters or upgrade to Gazebo 9.
[ WARN] [1624790611.489566865, 0.001000000]: For details, see https://github.com/ros-simulation/gazebo_ros_new_pkgs_new/issues/612
[robot/urdf_spawner_rbkairos_model-2] process has finished cleanly
log file: /home/david/.ros/log/4cfed202-d734-11eb-bfde-b0359f19f02d/robot-urdf_spawner_rbkairos_model-2*.log
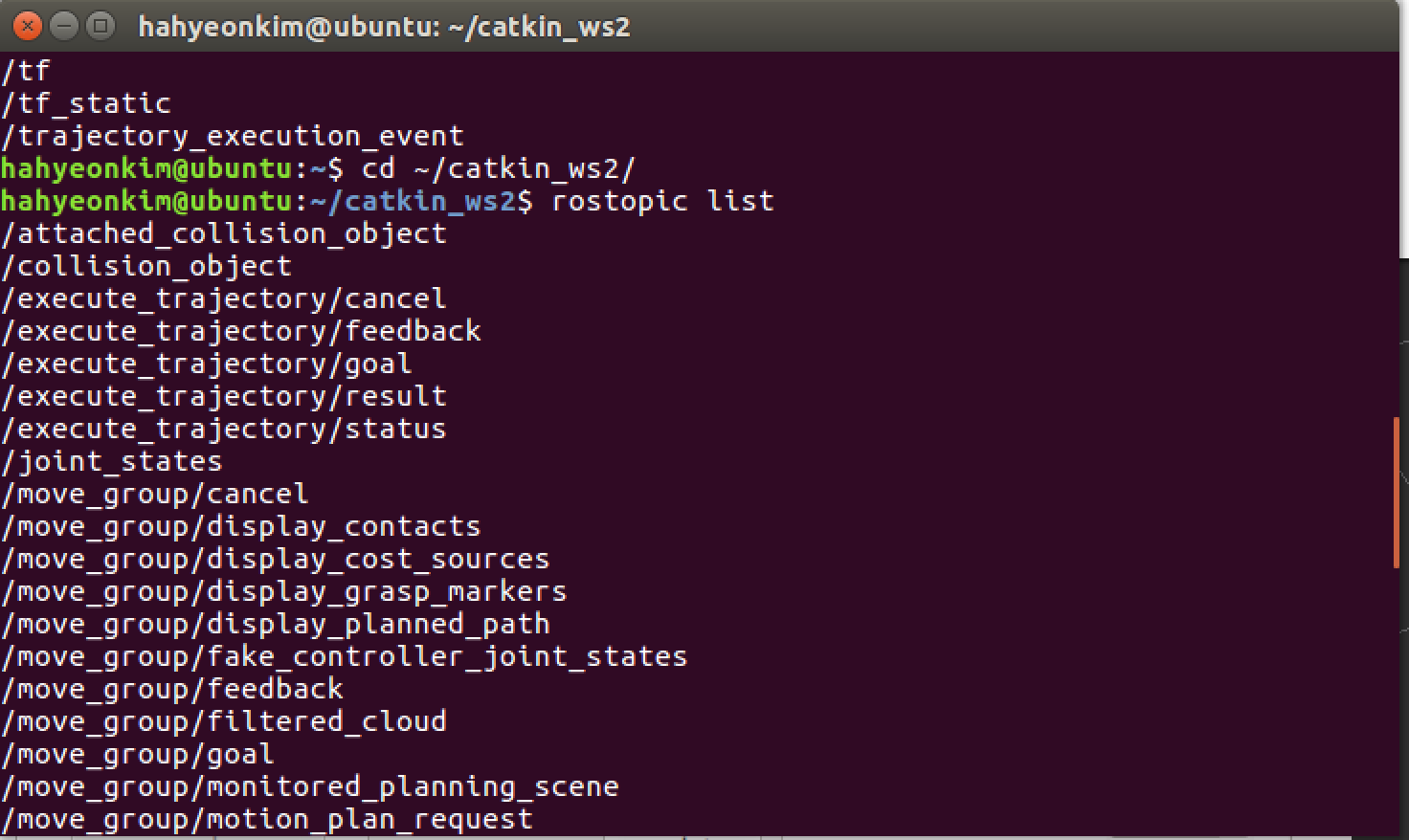
As you can see, there is no “/robot/arm_controller” so I can’t make the motion planning.
 After I launch with the command, it works.
After I launch with the command, it works.