Thank you @albertoezquerro. Now I encounter When I launch: roslaunch fetch_gazebo_demo move_torso.launch
It worked Once when I added the robot model and motion planning into it, save the rviz config, and load them with the command roslaunch fetch_moveit_config fetch_planning_execution.launch
After that I went through all of the python scripts with no issue.
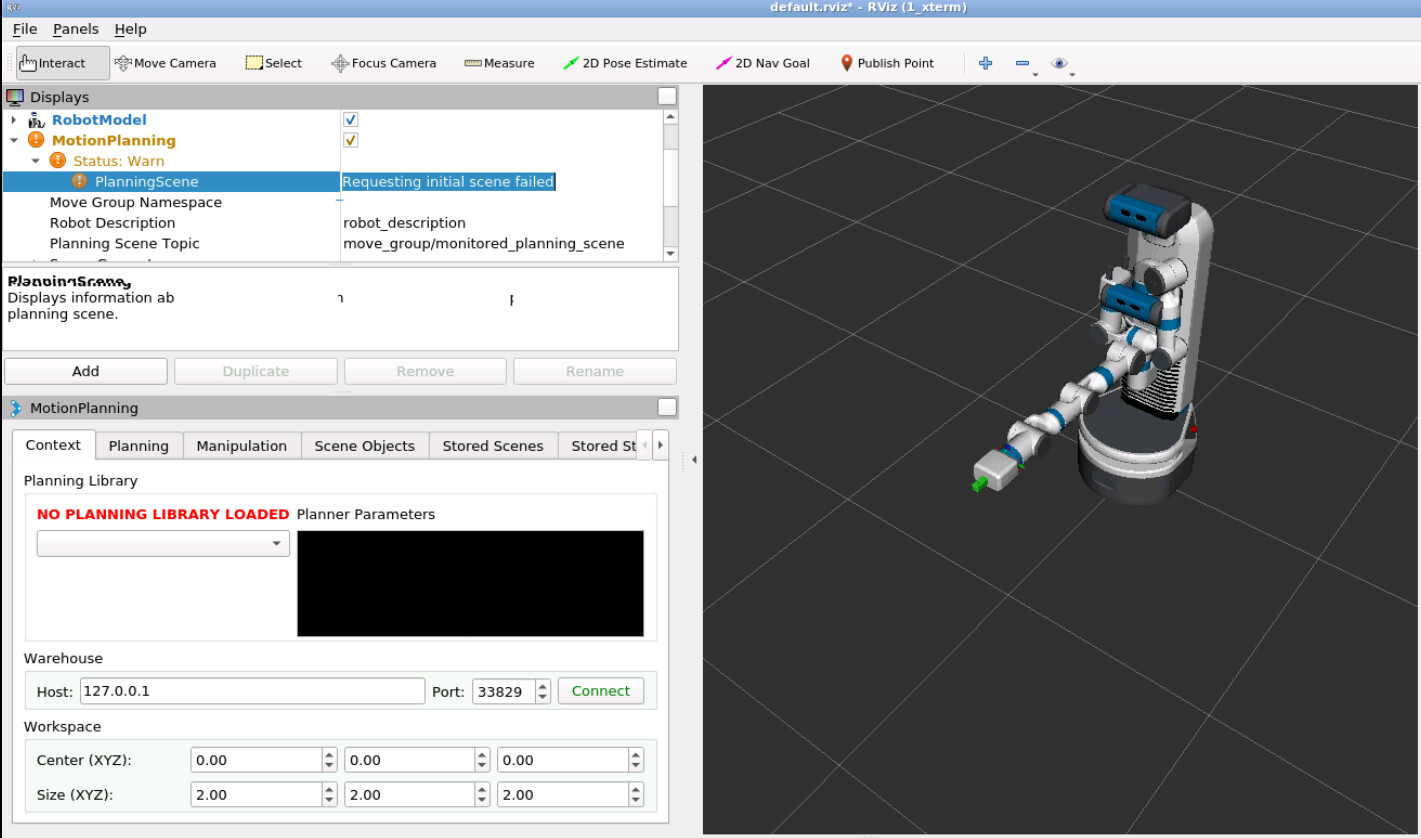
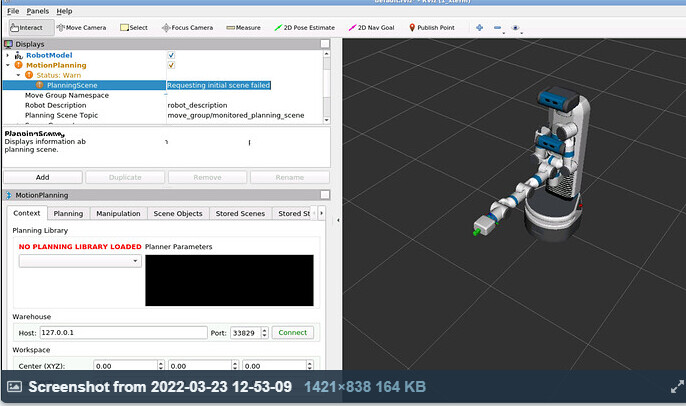
Then I do not know what I did wrong, when I run the code again, an error message shows like this:
Python script shell:
But no python script running at this time, why did this happen? I must miss something really important in the note but I can not find them by myself. Can you kindly point it out for me?
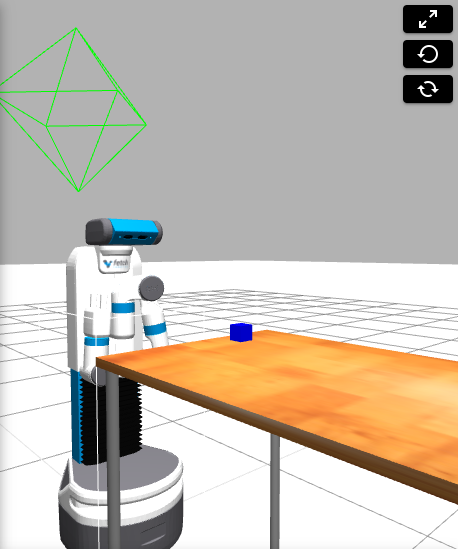
I set up the grasping environment as you guided me, bu it seems like no object are found in the rviz
About your Perception node, it is actually doing a detection since you are receiving the message in the result topic (at least for the object).
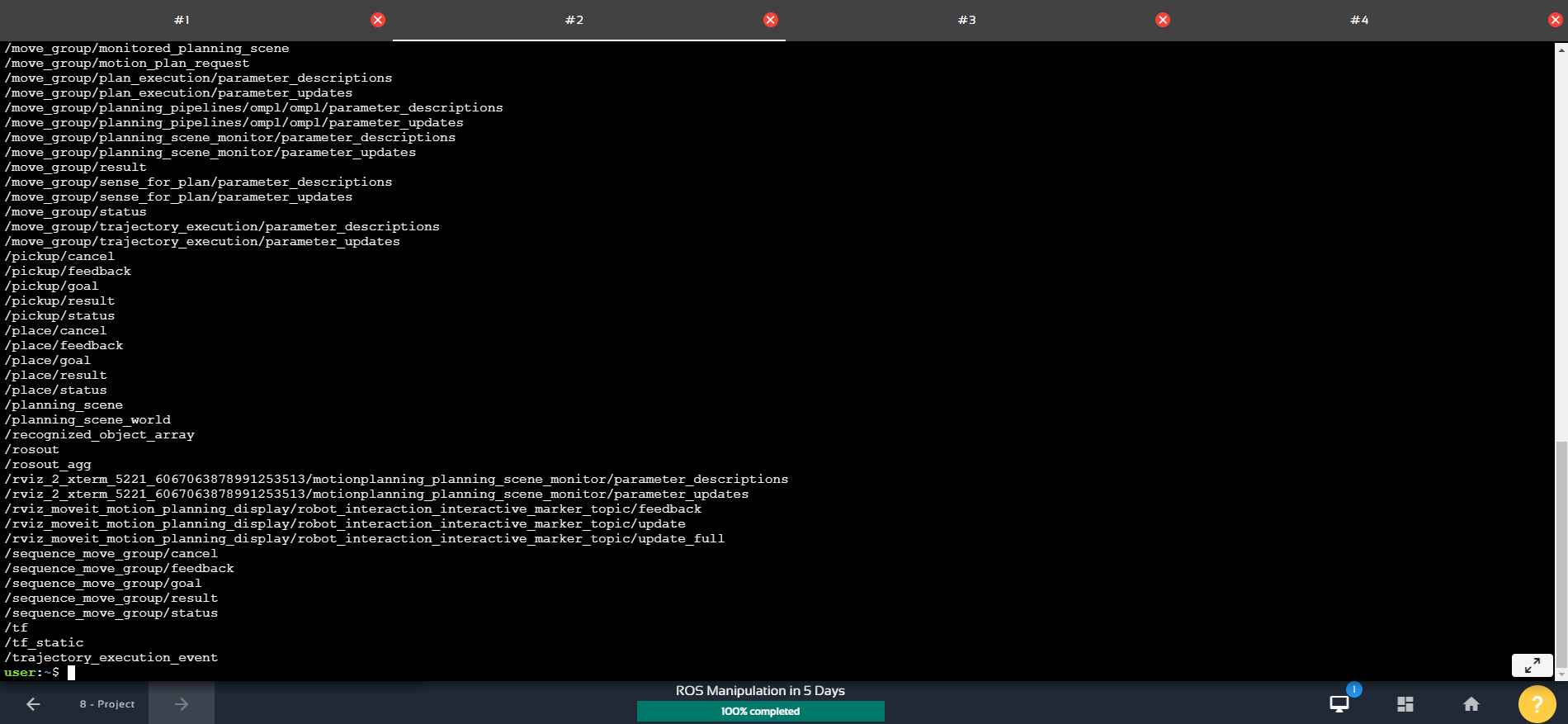
Make sure that you also add a display for the topic /basic_grasping_perception/object_cloud.
Also, make sure that you set up RViz properly before sending the goal to the perception action server. If you do it the other way, you won’t visualize the detections.
About the planning error, I’m not sure what’s the problem. The error/warning messages you are showing are normal, you can just ignore them. The problem is that it is not finding a valid motion. This can happen for many reasons. Could you record your screen so that we can better see what you are doing and how you are getting to this error?
Thank you. @albertoezquerro I moved on and started to do the ur3e project. For the the previous error ,you can see that in rivz model, window is showing two arms. Even when I shut everything down and start again.
For the unit 8 project exercise. After I created moveit pkg, the rviz is showing the planning and executing results but gazebo isn’t. Why?
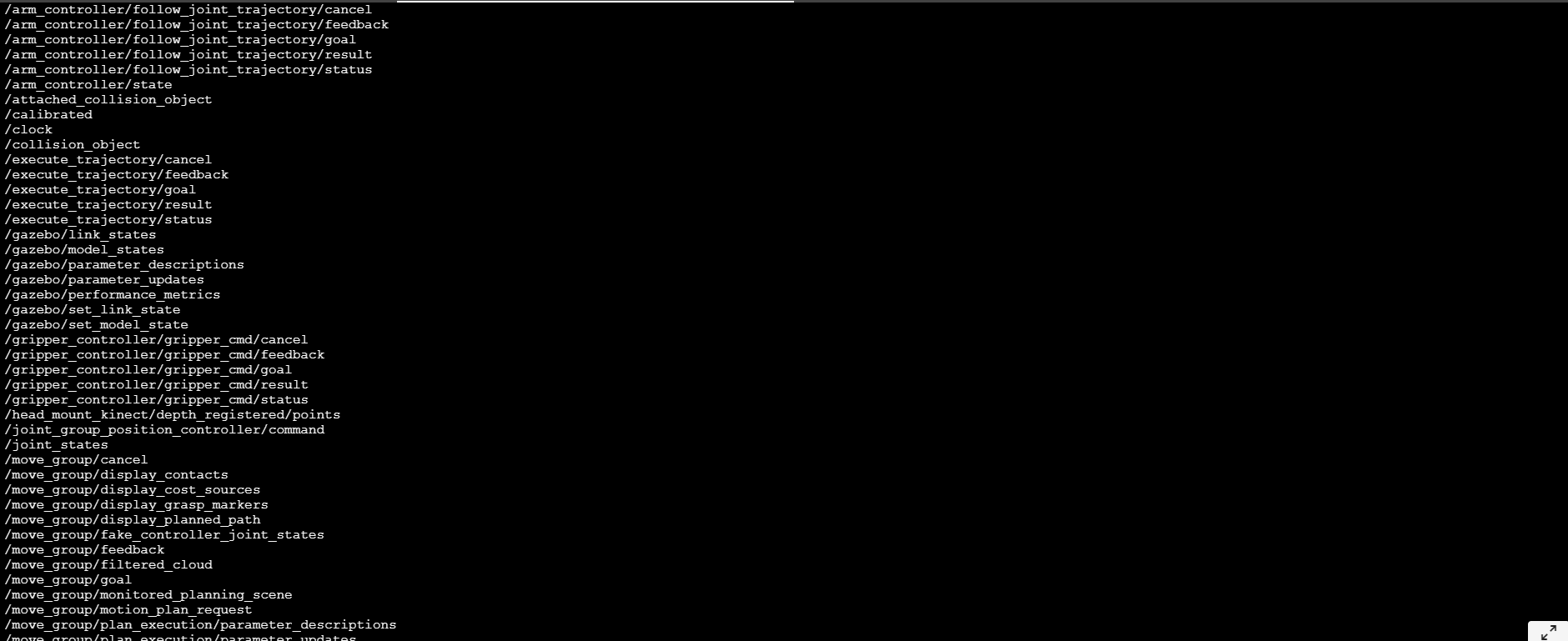
If the planning is working but it’s not being executed in Gazebo, it is most likely an error in the controllers.yaml file of your Moveit package. Make sure that the controller configuration is matching the Gazebo controller for the arm (/arm_controller/follow_joint_trajectory/...).
 .
.