Hi all!
Do you have any idea why am I seeing this behavior in the real robot lab?
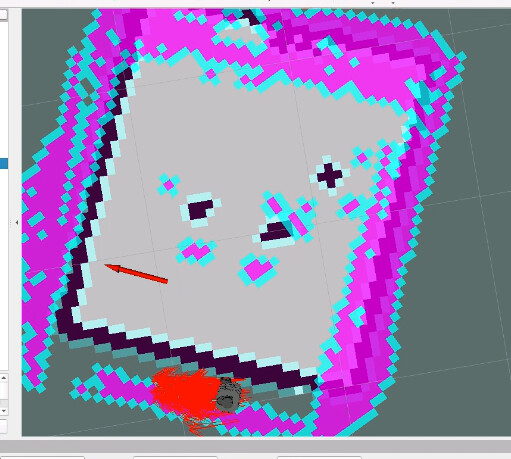
It seems the local costmap overlaps with itself as the robot moves.
This doesn’t happen in the simulation, so I guess the parameters should be well.
Of course, this overlapping produces the costmap to increase up to the point that the robot considers everything to be an obstacle. I don’t know why is this happening.
Thank youu!