Hi!
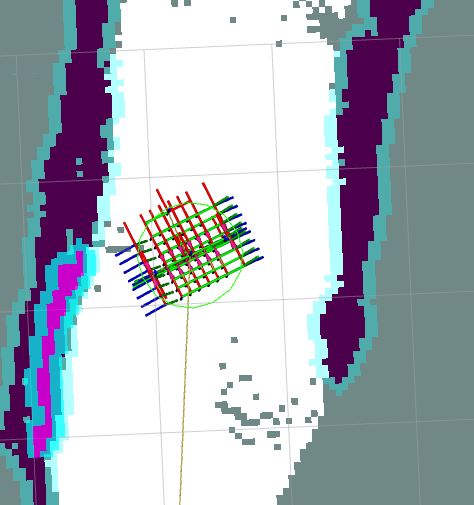
I am trying to map and localize my robot in its environment using RTABMAP with an RGBD camera + Nav2. I have no problem with the global costmap, as it works perfectly, however, my local costmap seems to not update properly, since sometimes the obstacles appear in the local costmap and sometimes not (comparing to the global costmap). I think the global costmap works fine because the occupancy grid is generated by RTABMAP and the global costmap just inflates the obstacles (I don’t think the obstacle_layer I placed there plays any role). However, as I understood, the local costmap is generated by Nav2 based on the sensors reading. The thing is that although the obstacles exist and they are captured by the RGBD camera delivering a pointcloud2 of the environment, the local_costmap is not always able to mark the obstacles.
Here you can see an image of my problem:
Here is my yaml configuration for Nav2:
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odom/unfiltered
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_navigate_to_pose_action_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: True
controller_server:
ros__parameters:
use_sim_time: True
odom_topic: /odom/unfiltered
controller_frequency: 5.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.001
min_theta_velocity_threshold: 0.001
progress_checker_plugin: "progress_checker"
goal_checker_plugin: "goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.2
movement_time_allowance: 20.0
# Goal checker parameters
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
stateful: True
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
publish_cost_grid_pc: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 4.0
max_vel_y: 4.0
max_vel_theta: 4.5
min_speed_xy: 0.4
max_speed_xy: 4.0
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 10
vtheta_samples: 20
sim_time: 1.2
linear_granularity: 0.05
time_granularity: 1.0
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist", "ObstacleFootprint"]
BaseObstacle.scale: 0.02
ObstacleFootprint.scale: 32.0
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: -1.0
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: True
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: world
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 3
height: 3
origin_x: -1.5
origin_y: -1.5
resolution: 0.05
always_send_full_costmap: True
robot_radius: 0.4
plugins: ["obstacle_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.1
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: pointcloud
pointcloud:
topic: /camera/points
max_obstacle_height: 10.0
min_obstacle_height: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
raytrace_max_range: 10.0
raytrace_min_range: 0.0
clearing: True
marking: True
data_type: "PointCloud2"
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: pointcloud
pointcloud:
topic: /camera/points
max_obstacle_height: 10.0
min_obstacle_height: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
raytrace_max_range: 10.0
raytrace_min_range: 0.0
clearing: True
marking: True
data_type: "PointCloud2"
local_costmap_client:
ros__parameters:
use_sim_time: True
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.4
resolution: 0.05
width: 3
height: 3
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: pointcloud
pointcloud:
topic: /camera/points
max_obstacle_height: 2.0
min_obstacle_height: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
raytrace_max_range: 10.0
raytrace_min_range: 0.0
clearing: True
marking: True
data_type: "PointCloud2"
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.1
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True
planner_server:
ros__parameters:
expected_planner_frequency: 1.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: True
allow_unknown: True
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: True
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "back_up", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
back_up:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: world
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: True
And here my parameters and remappings for RTABMAP:
parameters={
'frame_id':'base_link',
'use_sim_time':use_sim_time,
'subscribe_depth':True,
'use_action_for_goal':False,
'qos_image':qos,
'qos_imu':qos,
'Reg/Force3DoF':'true',
'Optimizer/GravitySigma':'0', # Disable imu constraints (we are already in 2D),
'Grid/MaxGroundHeight':'0.1',
'RGBD/LinearUpdate': '0.05'
}
remappings=[
('rgb/image', '/camera/image_raw'),
('rgb/camera_info', '/camera/camera_info'),
('depth/image', '/camera/depth/image_raw'),
('odom', '/odom/unfiltered')]
Thank you for your help!