Hello!
I need help with the real robot lab project of the Navigation in 5 days course.
I am stuck in section 3 where I am asked to implement the move_base launch file and load the parameters for the costmaps.
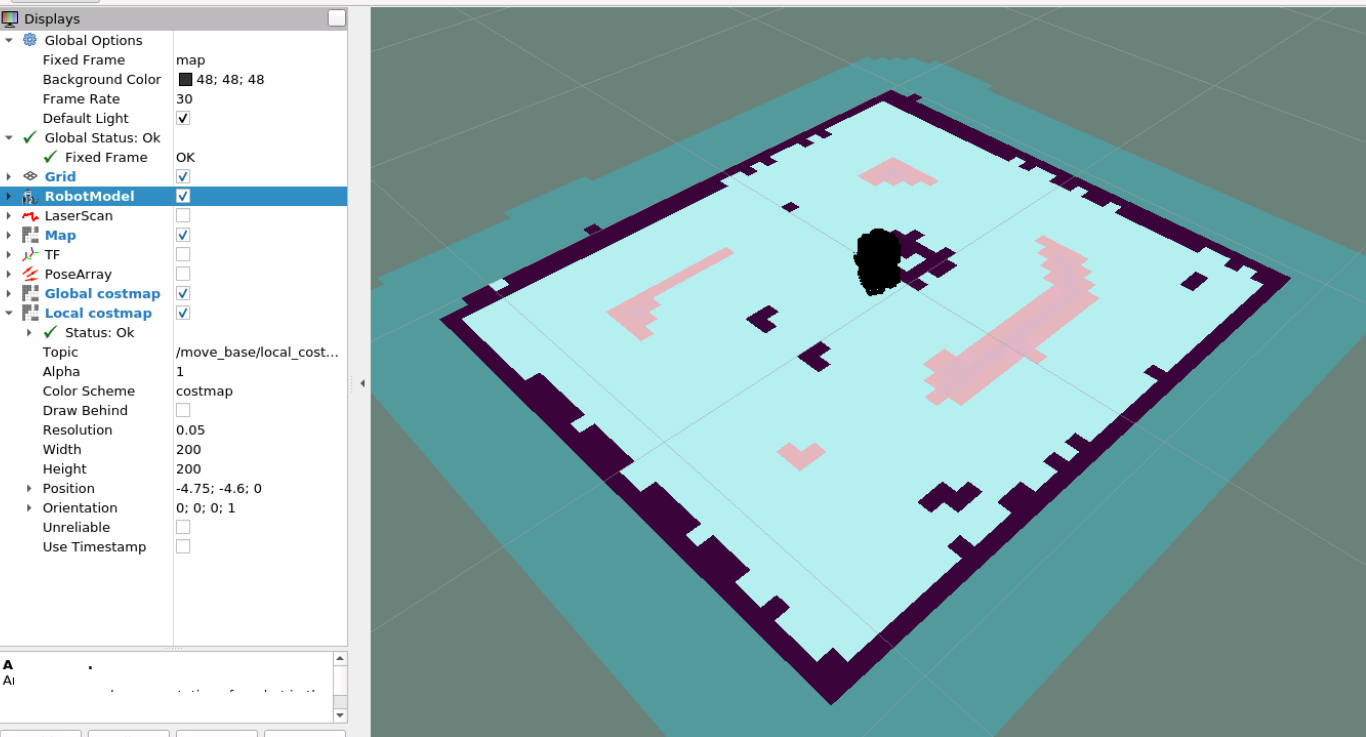
However, I am having problems in visualizing the local costmap and don’t know what I am doing wrong.
The global costmap is well displayed.
When launching the move_base_launcher.launch file, I have the following message from the console:
SUMMARY
PARAMETERS
- /amcl/base_frame_id: base_link
- /amcl/global_frame_id: map
- /amcl/gui_publish_rate: 10.0
- /amcl/kld_err: 0.05
- /amcl/kld_z: 0.99
- /amcl/laser_lambda_short: 0.1
- /amcl/laser_likelihood_max_dist: 2.0
- /amcl/laser_max_beams: 60
- /amcl/laser_max_range: 12.0
- /amcl/laser_model_type: likelihood_field
- /amcl/laser_sigma_hit: 0.2
- /amcl/laser_z_hit: 0.5
- /amcl/laser_z_max: 0.05
- /amcl/laser_z_rand: 0.5
- /amcl/laser_z_short: 0.05
- /amcl/max_particles: 2000
- /amcl/min_particles: 500
- /amcl/odom_alpha1: 0.2
- /amcl/odom_alpha2: 0.2
- /amcl/odom_alpha3: 0.2
- /amcl/odom_alpha4: 0.2
- /amcl/odom_alpha5: 0.1
- /amcl/odom_frame_id: odom
- /amcl/odom_model_type: diff
- /amcl/recovery_alpha_fast: 0.0
- /amcl/recovery_alpha_slow: 0.0
- /amcl/resample_interval: 1
- /amcl/transform_tolerance: 1.0
- /amcl/update_min_a: 0.2
- /amcl/update_min_d: 0.25
- /amcl/use_map_topic: False
- /move_base/DWAPlannerROS/acc_lim_theta: 2.0
- /move_base/DWAPlannerROS/acc_lim_x: 1.0
- /move_base/DWAPlannerROS/acc_lim_y: 0.0
- /move_base/DWAPlannerROS/forward_point_distance: 0.325
- /move_base/DWAPlannerROS/global_frame_id: odom
- /move_base/DWAPlannerROS/goal_distance_bias: 24.0
- /move_base/DWAPlannerROS/max_rot_vel: 5.0
- /move_base/DWAPlannerROS/max_scaling_factor: 0.2
- /move_base/DWAPlannerROS/max_trans_vel: 0.5
- /move_base/DWAPlannerROS/max_vel_x: 0.5
- /move_base/DWAPlannerROS/max_vel_y: 0.0
- /move_base/DWAPlannerROS/min_rot_vel: 0.4
- /move_base/DWAPlannerROS/min_trans_vel: 0.1
- /move_base/DWAPlannerROS/min_vel_x: 0.0
- /move_base/DWAPlannerROS/min_vel_y: 0.0
- /move_base/DWAPlannerROS/occdist_scale: 0.5
- /move_base/DWAPlannerROS/oscillation_reset_dist: 0.05
- /move_base/DWAPlannerROS/path_distance_bias: 64.0
- /move_base/DWAPlannerROS/publish_cost_grid_pc: True
- /move_base/DWAPlannerROS/publish_traj_pc: True
- /move_base/DWAPlannerROS/rot_stopped_vel: 0.4
- /move_base/DWAPlannerROS/scaling_speed: 0.25
- /move_base/DWAPlannerROS/sim_time: 1.0
- /move_base/DWAPlannerROS/stop_time_buffer: 0.2
- /move_base/DWAPlannerROS/trans_stopped_vel: 0.1
- /move_base/DWAPlannerROS/vtheta_samples: 20
- /move_base/DWAPlannerROS/vx_samples: 6
- /move_base/DWAPlannerROS/vy_samples: 1
- /move_base/DWAPlannerROS/xy_goal_tolerance: 0.15
- /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.3
- /move_base/NavfnROS/allow_unknown: False
- /move_base/NavfnROS/default_tolerance: 0.0
- /move_base/NavfnROS/planner_window_x: 0.0
- /move_base/NavfnROS/planner_window_y: 0.0
- /move_base/NavfnROS/visualize_potential: False
- /move_base/base_global_planner: navfn/NavfnROS
- /move_base/base_local_planner: dwa_local_planner…
- /move_base/controller_frequency: 5.0
- /move_base/controller_patience: 15.0
- /move_base/global_costmap/footprint: [[-0.5, -0.33], […
- /move_base/global_costmap/footprint_padding: 0.01
- /move_base/global_costmap/global_frame: map
- /move_base/global_costmap/inflation_layer/enabled: True
- /move_base/global_costmap/inflation_layer/inflation_radius: 0.5
- /move_base/global_costmap/max_obstacle_height: 0.6
- /move_base/global_costmap/obstacle_layer/observation_sources: scan
- /move_base/global_costmap/obstacle_layer/scan/clearing: True
- /move_base/global_costmap/obstacle_layer/scan/data_type: LaserScan
- /move_base/global_costmap/obstacle_layer/scan/marking: True
- /move_base/global_costmap/obstacle_layer/scan/topic: scan
- /move_base/global_costmap/obstacle_range: 2.5
- /move_base/global_costmap/plugins: [{‘name’: 'static…
- /move_base/global_costmap/publish_frequency: 3.0
- /move_base/global_costmap/raytrace_range: 3.0
- /move_base/global_costmap/resolution: 0.05
- /move_base/global_costmap/robot_base_frame: base_link
- /move_base/global_costmap/robot_radius: 0.2
- /move_base/global_costmap/static_layer/enabled: True
- /move_base/global_costmap/static_layer/map_topic: /map
- /move_base/global_costmap/static_layer/subscribe_to_updates: True
- /move_base/global_costmap/static_map: True
- /move_base/global_costmap/transform_tolerance: 0.5
- /move_base/global_costmap/update_frequency: 4.0
- /move_base/local_costmap/footprint: [[-0.5, -0.33], […
- /move_base/local_costmap/footprint_padding: 0.01
- /move_base/local_costmap/global_frame: odom
- /move_base/local_costmap/height: 10.0
- /move_base/local_costmap/inflation_layer/enabled: True
- /move_base/local_costmap/inflation_layer/inflation_radius: 0.5
- /move_base/local_costmap/max_obstacle_height: 0.6
- /move_base/local_costmap/obstacle_layer/observation_sources: scan
- /move_base/local_costmap/obstacle_layer/scan/clearing: True
- /move_base/local_costmap/obstacle_layer/scan/data_type: LaserScan
- /move_base/local_costmap/obstacle_layer/scan/marking: True
- /move_base/local_costmap/obstacle_layer/scan/topic: scan
- /move_base/local_costmap/obstacle_range: 2.5
- /move_base/local_costmap/plugins: [{‘name’: 'obstac…
- /move_base/local_costmap/publish_frequency: 2.0
- /move_base/local_costmap/raytrace_range: 3.0
- /move_base/local_costmap/resolution: 0.05
- /move_base/local_costmap/robot_base_frame: base_link
- /move_base/local_costmap/robot_radius: 0.2
- /move_base/local_costmap/rolling_window: True
- /move_base/local_costmap/static_layer/enabled: True
- /move_base/local_costmap/static_layer/map_topic: /map
- /move_base/local_costmap/static_layer/subscribe_to_updates: True
- /move_base/local_costmap/static_map: False
- /move_base/local_costmap/transform_tolerance: 0.5
- /move_base/local_costmap/update_frequency: 5.0
- /move_base/local_costmap/width: 10.0
- /move_base/oscillation_distance: 0.2
- /move_base/oscillation_timeout: 10.0
- /move_base/planner_frequency: 1.0
- /move_base/planner_patience: 5.0
- /rosdistro: noetic
- /rosversion: 1.15.11
NODES
/
amcl (amcl/amcl)
map_server (map_server/map_server)
move_base (move_base/move_base)ROS_MASTER_URI=http://2_xterm:11311
process[map_server-1]: started with pid [5118]
487.049466534, 2193.708000000]: Recovery behavior will clear layer ‘obstacles’
process[amcl-2]: started with pid [5120]
process[move_base-3]: started with pid [5122]
[ WARN] [1640825483.694921821, 2191.311000000]: global_costmap: Pre-Hydroparameter “static_map” unused since “plugins” is provided
[ WARN] [1640825483.724409355, 2191.327000000]: global_costmap: Pre-Hydroparameter “map_type” unused since “plugins” is provided
[ INFO] [1640825483.735551598, 2191.336000000]: global_costmap: Using plugin “static_layer”
[ INFO] [1640825483.866849030, 2191.451000000]: Requesting the map…
[ INFO] [1640825484.151184126, 2191.660000000]: Resizing costmap to 384 X384 at 0.050000 m/pix
[ INFO] [1640825484.277820884, 2191.766000000]: Received a 384 X 384 map at 0.050000 m/pix
[ INFO] [1640825484.277890321, 2191.766000000]: Subscribing to updates
[ INFO] [1640825484.322473891, 2191.803000000]: global_costmap: Using plugin “inflation_layer”
[ WARN] [1640825484.898002160, 2192.151000000]: local_costmap: Pre-Hydro parameter “static_map” unused since “plugins” is provided
[ WARN] [1640825484.907594711, 2192.158000000]: local_costmap: Pre-Hydro parameter “map_type” unused since “plugins” is provided
[ INFO] [1640825484.920820823, 2192.170000000]: local_costmap: Using plugin “obstacle_layer”
[ INFO] [1640825485.018891120, 2192.233000000]: Subscribed to Topics:scan
[ INFO] [1640825485.299199721, 2192.415000000]: local_costmap: Using plugin “inflation_layer”
[ INFO] [1640825485.686880010, 2192.681000000]: Created local_planner dwa_local_planner/DWAPlannerROS
[ INFO] [1640825485.713321739, 2192.697000000]: Sim period is set to 0.20
[ WARN] [1640825485.785224971, 2192.739000000]: Parameter max_trans_vel is deprecated (and will not load properly). Use max_vel_trans instead.
[ WARN] [1640825485.788836173, 2192.741000000]: Parameter min_trans_vel is deprecated (and will not load properly). Use min_vel_trans instead.
[ WARN] [1640825485.794497285, 2192.742000000]: Parameter max_rot_vel is deprecated (and will not load properly). Use max_vel_theta instead.
[ WARN] [1640825485.795751863, 2192.742000000]: Parameter min_rot_vel is deprecated (and will not load properly). Use min_vel_theta instead.
[ WARN] [1640825485.799330144, 2192.743000000]: Parameter rot_stopped_velis deprecated (and will not load properly). Use theta_stopped_vel instead.
[ INFO] [1640825
[ INFO] [1640825487.147485578, 2193.768000000]: Recovery behavior will clear layer ‘obstacles’
[ INFO] [1640825487.516254253, 2194.027000000]: odom received!
I don’t know what’s wrong with the parameters I set. I’ll appreciate your help.
Thanks !!