For my project, I have a requirement to create an world that looks similar to airport , precisely departure area. I am building the world currently. Is there a way I can upload the world into the construct environment and test algorithms with T3 bot?
Thanks
Hello @mohammed.sahadatalam ,
Yes, you can create a new ROSject in the ROS Development Studio area and upload all your code there. We already have a repo for the T3 simulation, here: Bitbucket
Once you have your world created, you can just substitute it in one of the launch files for starting the simulation. For instance, here: Bitbucket
Let us know if you have any doubt/problem during the process.
Hi,
I’m trying to do the same about loading a Turtlebot3 in a custom world, but I got an error. I cloned the turtlebot3 repo into my catkin_ws/src in ROS Development Studio, and I substituted the highlighted line of turtlebot3_empty_world.launch by this one:
<arg name="world_name" value="$(find pizza_parlor_gazebo)/worlds/pizza_parlor.world"/>
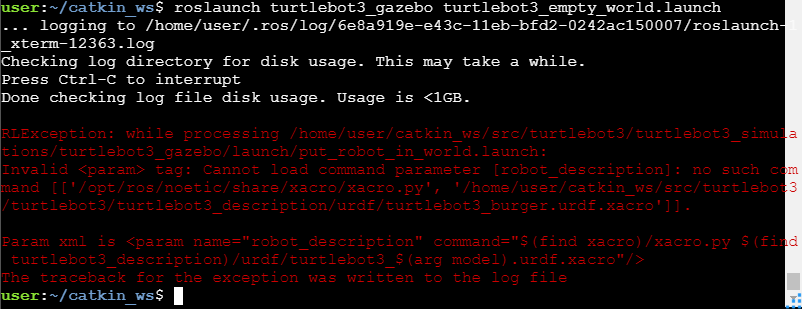
pizza_parlor_gazebo is the package in which I have my custom world, and pizza_parlor.world is my custom world file. But when I try to launch turtlebot3_empty_world.launch this error appears:
I don’t know what the error means, do I need to do something else? Thanks in advance.
Hello @a01731815 ,
It looks like you are using the deprecated xacro.py command to load the xacro file. Since Noetic, you should be using only xacro instead. See point 9 in the Noetic migration notes, here: noetic/Migration - ROS Wiki.