after forking the rosject from Ms. rtellez and trying to run it with roslaunch an Warning occurred :
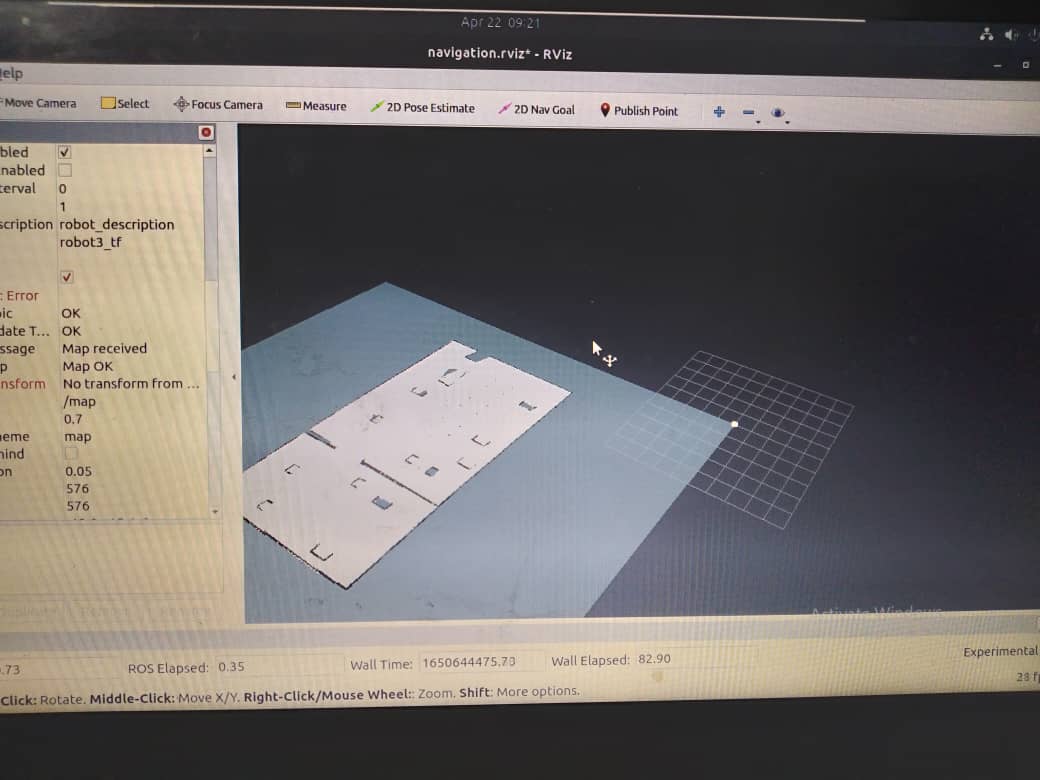
Warning: Invalid argument “/map” passed to canTransform argument target_frame in tf2 frame_ids cannot start with a ‘/’ like:
at line 134 in /tmp/binarydeb/ros-noetic-tf2-0.7.5/src/buffer_core.cpp
after that i change the “/” in move base robot one and 2 and 3 another Warning occurred :
[ WARN] [1649815990.437787911, 1.580000000]: Frame_id of map received:’/map’ doesn’t match global_frame_id:‘map’. This could cause issues with reading published topics
and i am not know why and how to solve this warning please help me 
Hi @sajid99 ,
Could you provide more details about what error you had?
Is there something related to the mapping that is not working properly?
Changing from kinetic to noetic could raise many errors, since you need to check each one of the packages being used and see if they are compatible with this new ROS distro.
Hi
yes the mapping was not working properly . and this Warning: Invalid argument “/map” passed to canTransform argument target_frame in tf2 frame_ids cannot start with a ‘/’ like:
at line 134 in /tmp/binarydeb/ros-noetic-tf2-0.7.5/src/buffer_core.cpp appears to me .
the forked rosject was noetic version .
It’s important to consider that warnings are not errors, most of the times they are not preventing something to be performed, it depends. In that case, there could be some due to different distros, deprecated code, etc.
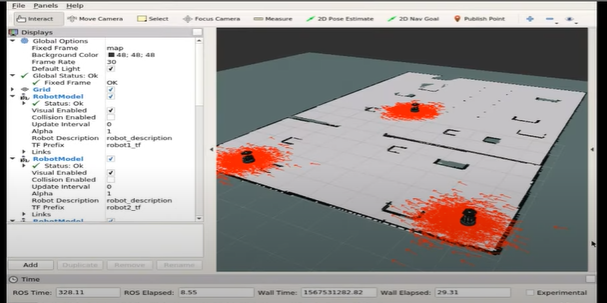
Could you share a screenshot of what you mean by “mapping not working properly”?
As I mentioned, you need to make sure it is working first in the distro we have provided the rosject, in this case it was kinetic. Then you could try a different one, but we can not ensure it will work since many things have changed since one distro to another.
What was the expected result?
Could you share the rosject where you have it working?
It would help us to see what is the difference and to try out with Kinetic and Noetic
I am clicking on the share button but no link appears to me to share it with you. I forked the roject from ms. Ricardo Tellez.
the project is a live class 64 multiple robot navigation.
Hi @sajid99 ,
Unfortunately I can’t help with this error, it is an issue inside the binaries of Noetic distro installation and this live class script was prepared for kinetic.
I’m sorry that it is not as simple as we would like it was, but switching from one distro to another could become more complex than that.
I recommend you to check the packages used and check if they are compatible, but for the scope of the program presented, I can’t help much more.
Thank you for your time. I appreciate it. 
1 Like
This topic was automatically closed 24 hours after the last reply. New replies are no longer allowed.