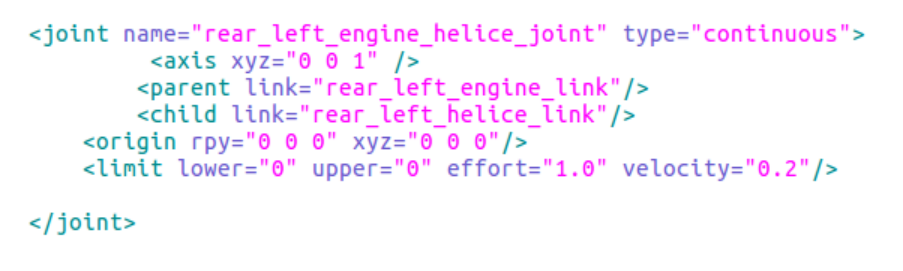
I created my own robot model, but when I defined the joints’ axis and origin, I noticed that the joints aren’t able to rotate according to the defined axis which are the link axis but instead the link rotate according to base link’s axe, and when I define the origin to values not 0 0 0, the joints’ positions change, any recommendations!
?
Hi @adellusakula,
Joints are always defined relative to their parent (base link). You have to move the origin relative to the parent link.
can you please explain more