@staff my Jibo just move in Rviz but does not move in Gazebo. What could be the issue?
The controllers are loaded correctly.
And through rostopic echo I can see that there are values being published:
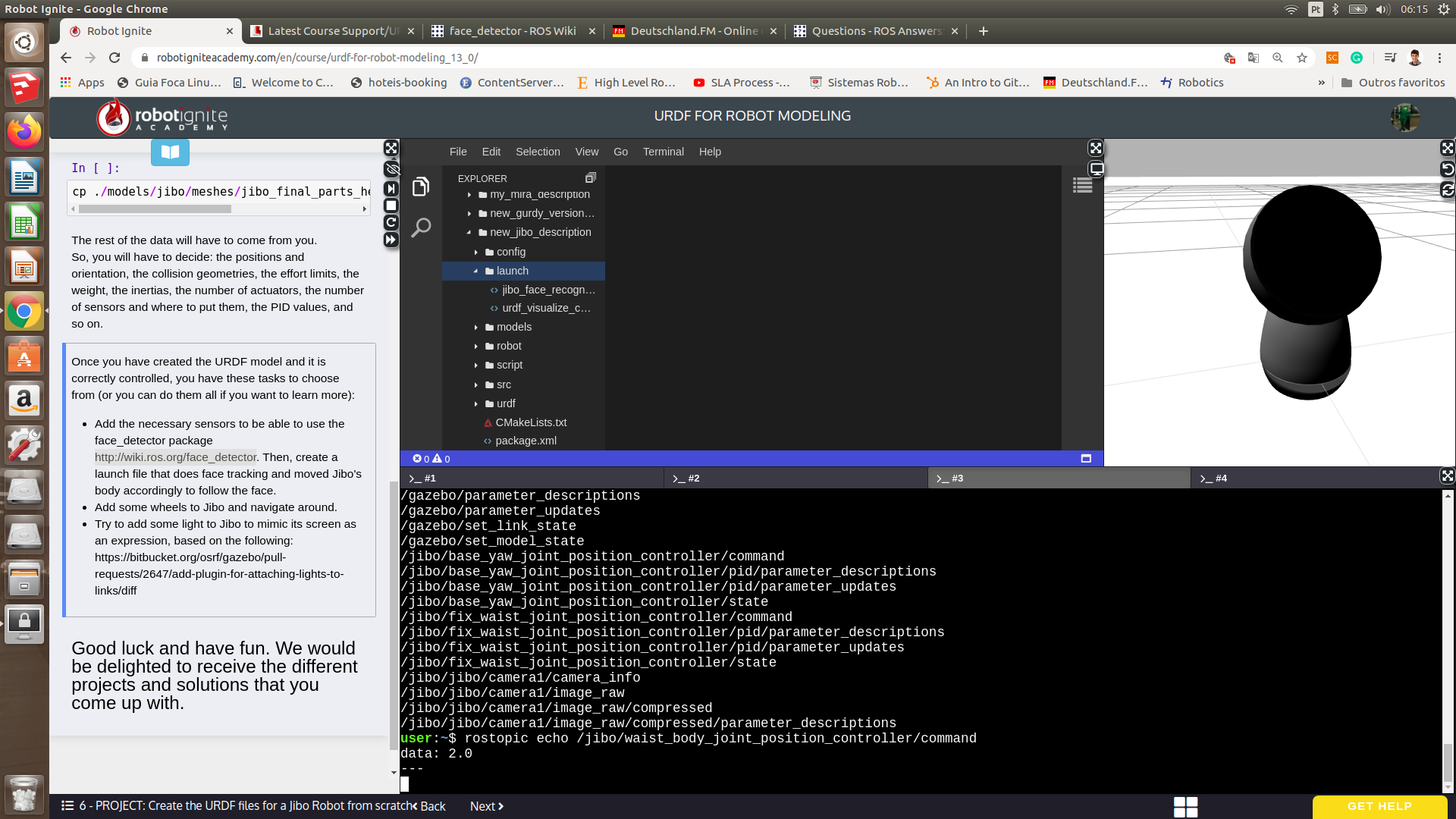
My package is below:
@staff my Jibo just move in Rviz but does not move in Gazebo. What could be the issue?
The controllers are loaded correctly.
And through rostopic echo I can see that there are values being published:
My package is below:
I just would like to know why my model does not work in Gazebo, just in Rviz. I used the correct Jibo Urdf from source directory of construct SIM and the Jibo moves in Gazebo. I know my model used more joints than enough ( I used 5 or 6 and the “solution” is just 3), but I did this in order to make Jibo behaviour more similar the videos I have seen in official site, where it also moved the waist in an arc or circunference not just continuously in yaw as the solution displays, but also in roll angles, like shaking its waist…But the question is: What is wrong in my urdf, that Jibo just work with fake joints values? and not with reall controllers?