Hello community,
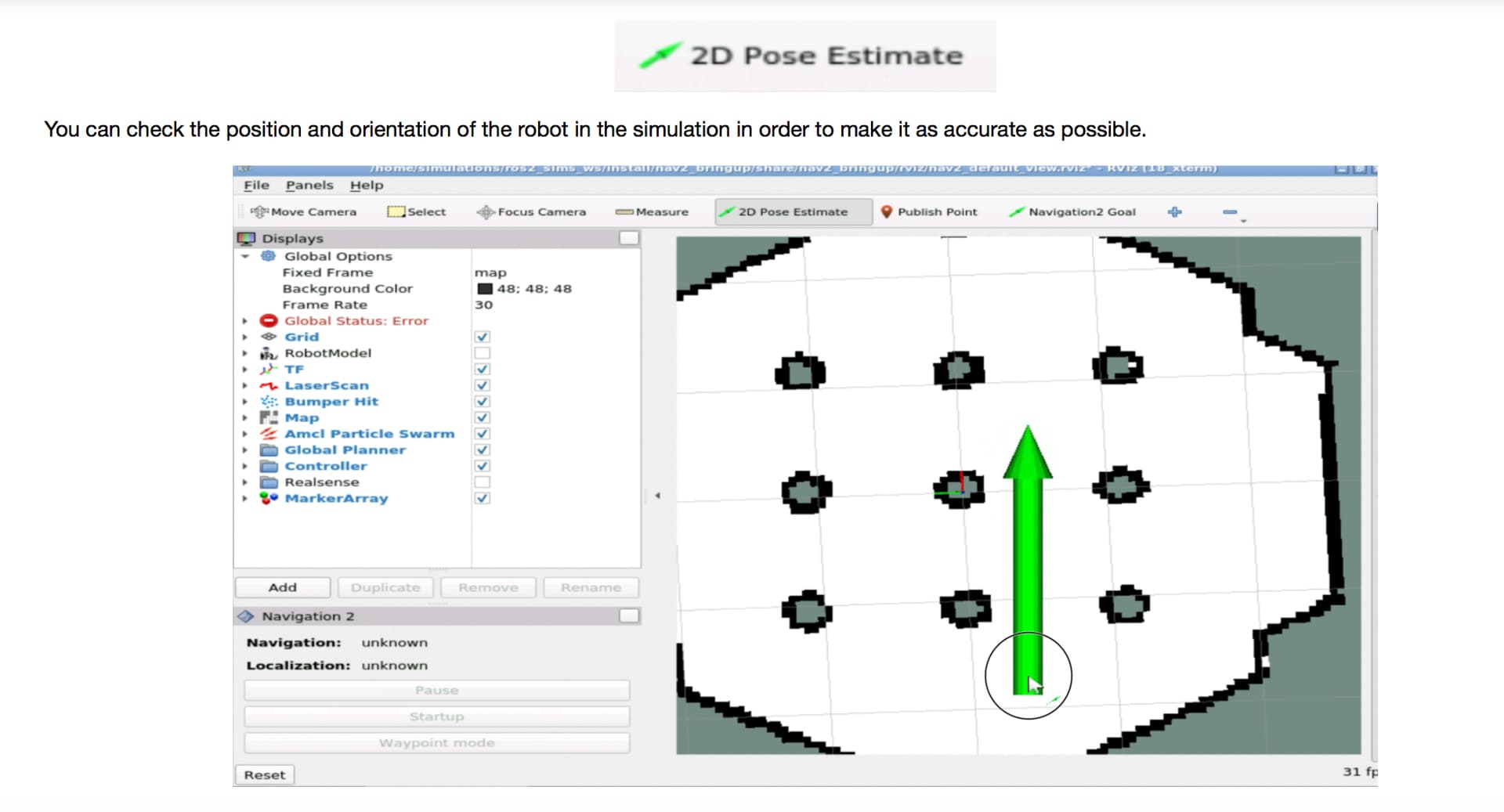
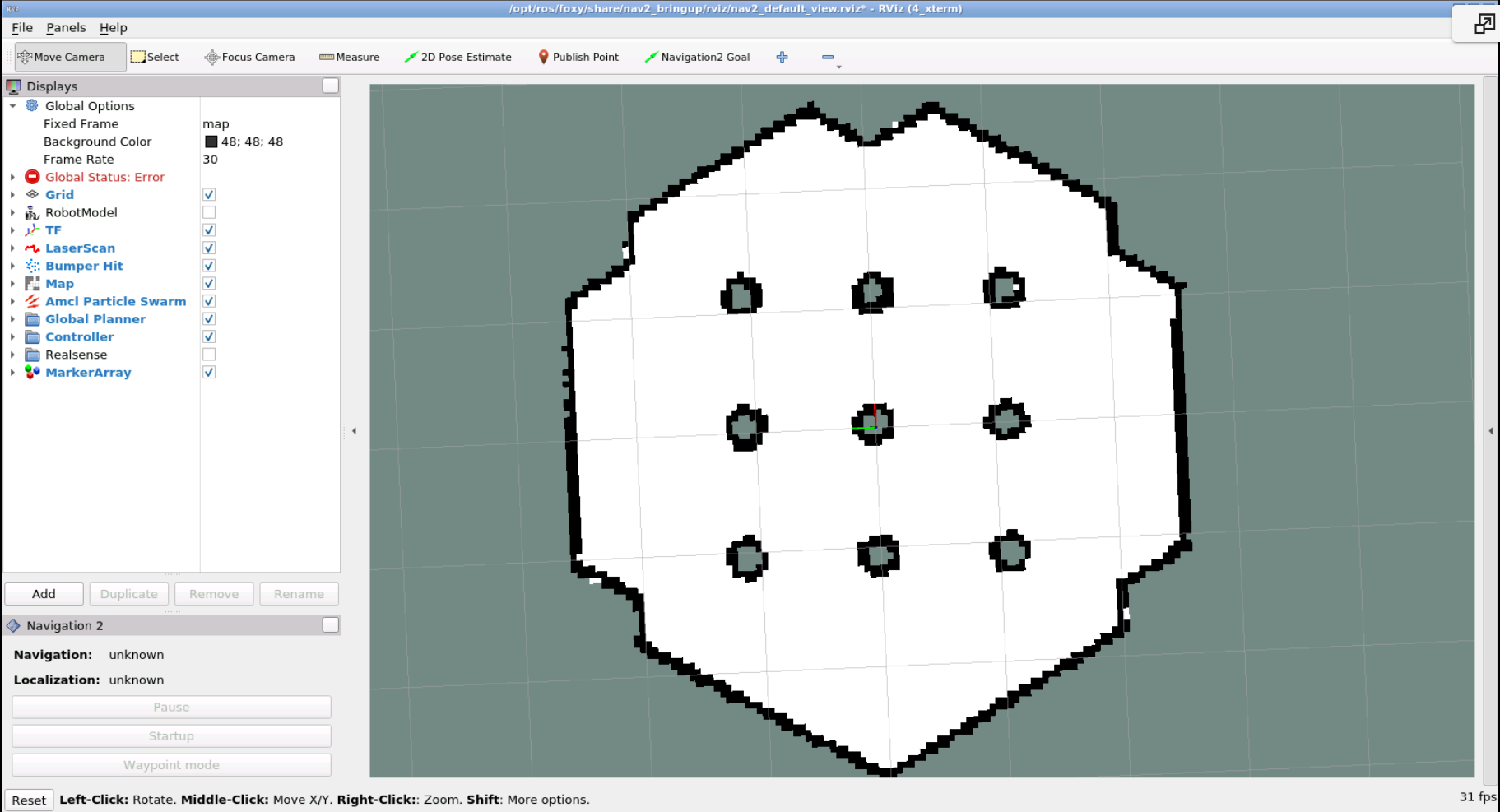
I am trying to launch the example in chapter one. However, it seems like the Rviz is not working correctly.
The turtle bot is not showing on the Rviz, and there are a lot of error messages that continue to pop out on the console.
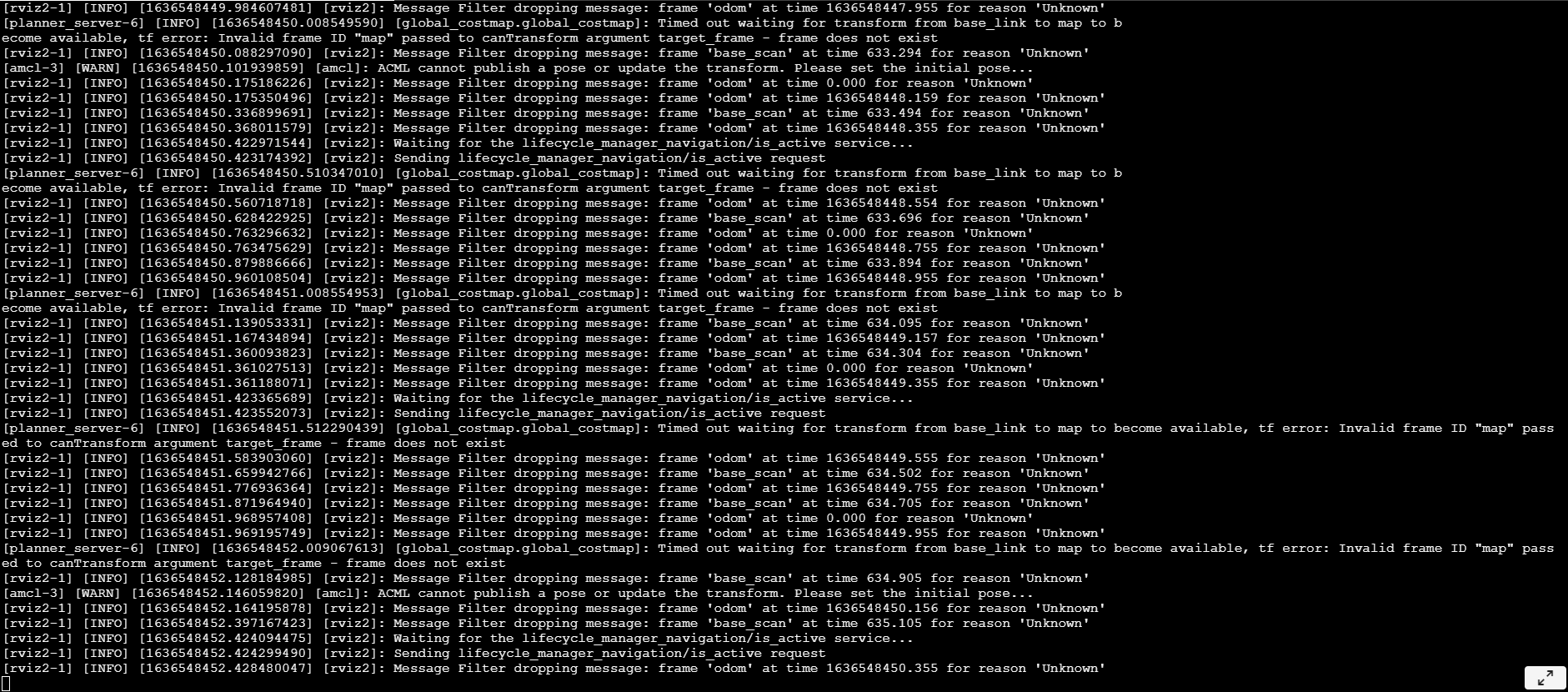
It is my first time learning nav2, so I do not know where should I debug from.
Please let me know if I missed something.
Thanks!