Hi everyone
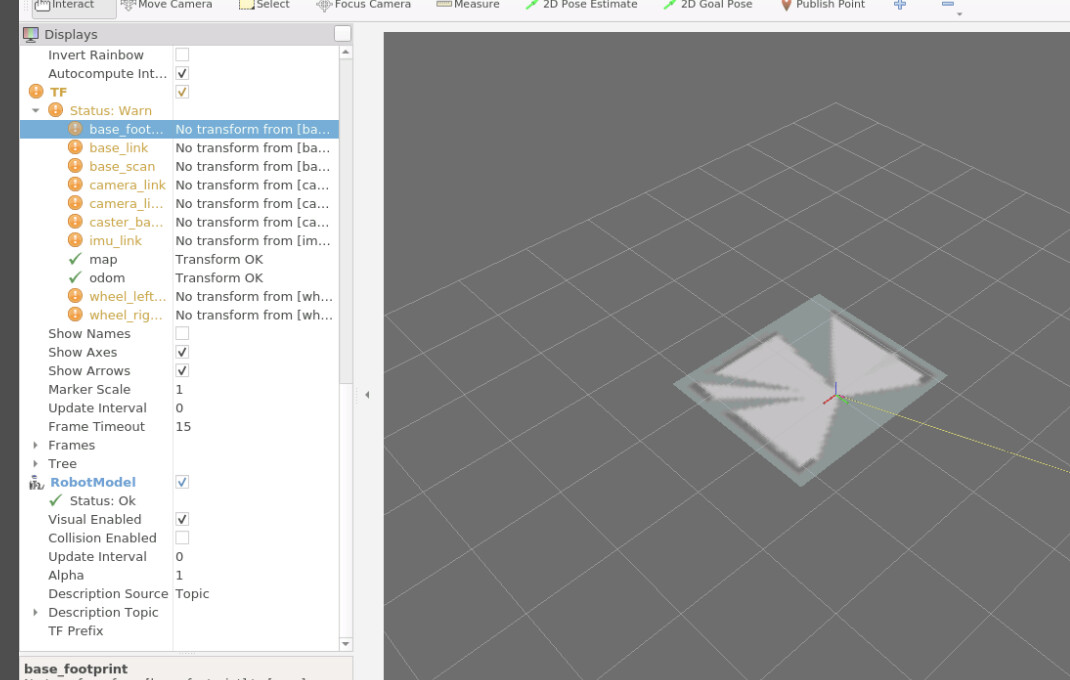
I have problems with TF values in the final project…
Thanks again
Hi again
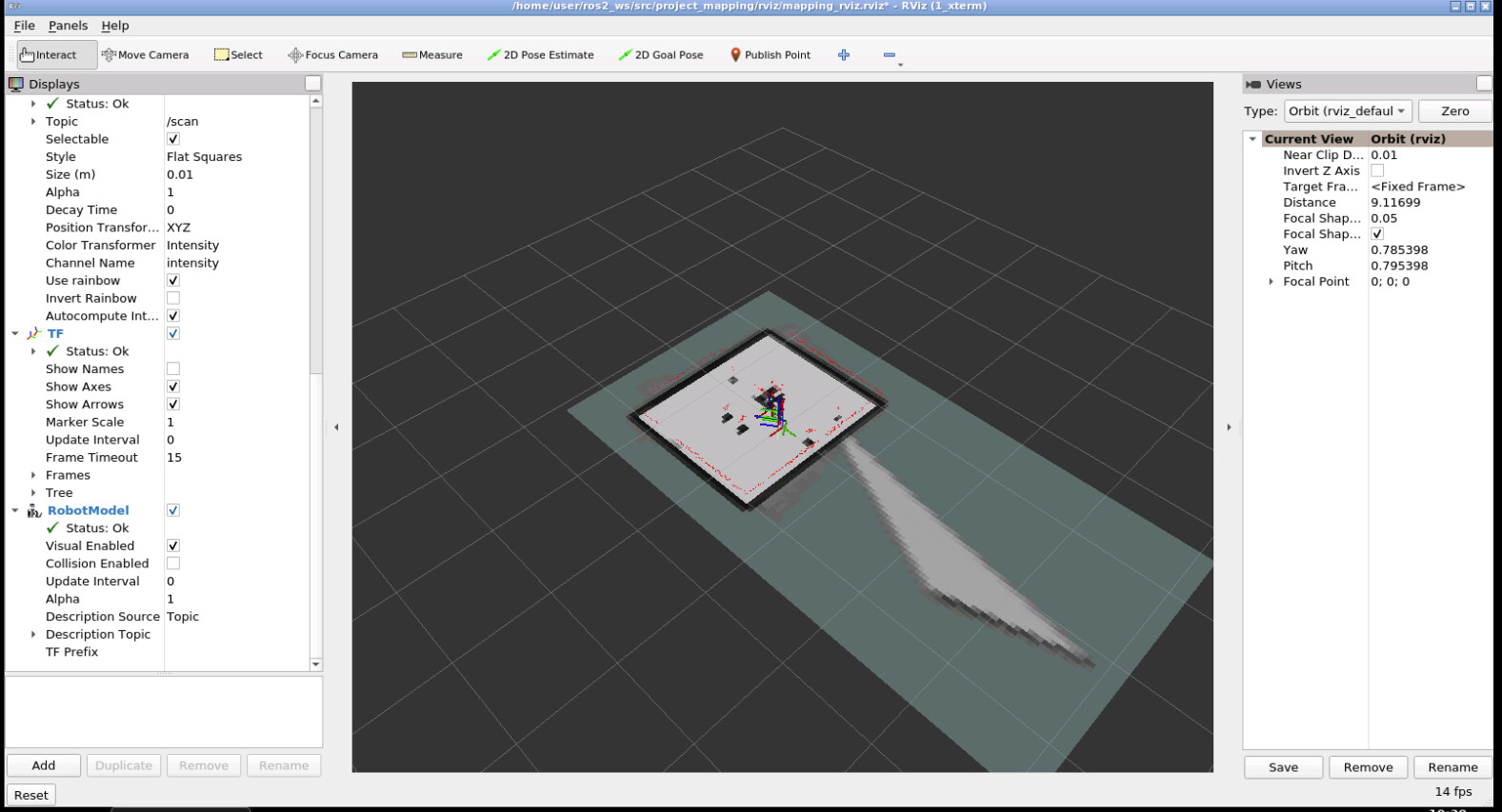
I thought it was solved by following the instructions described in ROS2 Nav2 Course project problems to another student but, even the transform data seems to be ok, the map includes an extra area ¿?
Thanks again

The extra area has nothing to do with the TF issue. The TFs were probably not connected because the amcl initial pose hadn’t been set yet.
As for the map, that is not an issue. For some reason the mapper thought there was a hole in that location and it printed it out in the map. This is ok though, it won’t affect anything.
Thanks @roalgoal!! The TF issue was solved by changing the parameters tracking_frame and TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching.
Ok for the map, then.
Thanks again!
This topic was automatically closed after 3 days. New replies are no longer allowed.