Following the official manual of NAV2, I have read the followed material:
- Navigation Concepts (Navigation Concepts — Navigation 2 1.0.0 documentation).
- Chapters 1, 2, and 3 of the book ‘Behavior Trees in Robotics and AI: An Introduction.’ ([1709.00084] Behavior Trees in Robotics and AI: An Introduction)
- A discussion about GUI tool (Groot - Interacting with Behavior Trees — Navigation 2 1.0.0 documentation)
- ‘Introduction To Nav2 Specific Nodes’ (Introduction To Nav2 Specific Nodes — Navigation 2 1.0.0 documentation)
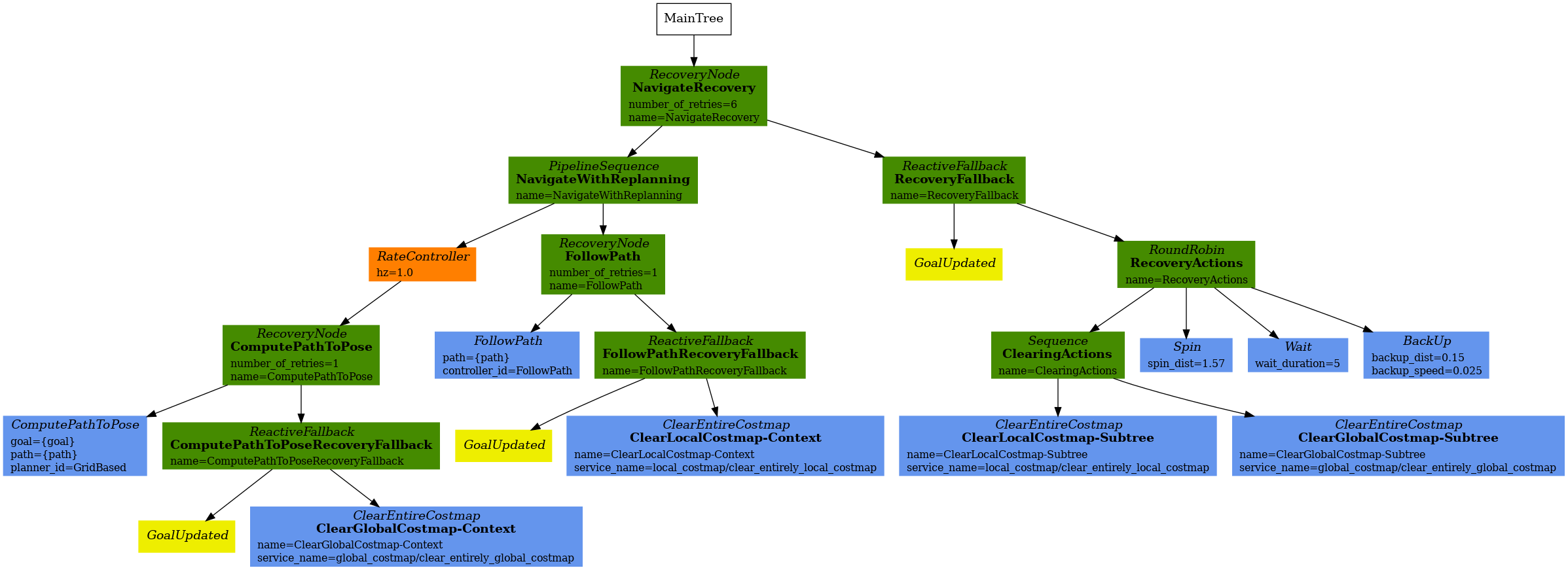
- ‘Detailed Behavior Tree Walkthrough’ (Detailed Behavior Tree Walkthrough — Navigation 2 1.0.0 documentation)
It seems that if we clean the local cost map or the global cost map, the robot can be rescued.
In my opinion, the cost map should not be cleaned.
If it is got cleaned when it will be built by the planner and the controller again?
The cost map is the series of results that are generated by data fusion programs. If we can mix surrounding information from different sources into a map, the decision certainly can be made on it. In my opinion, it looks like the sand table in front of the General. the robot goes into trouble just because it has too little information about the environment. It is better to collect more information at the moment, rather than cleaning the cost map and losing more information.
As the old saying goes, the cat shuts its eyes when stealing cream.